Download
1 / 14
140 likes | 282 Views
Second Order Cone Programming for Robust Localization in Mobile Sensor Networks. Ghasem Naddafzadeh-Shirazi Lutz Lampe. Sensor Localization problem. Given location of K anchors and the pair-wise distance measurements of N-K nodes, estimate their location. Presence of noise in measurements:

E N D
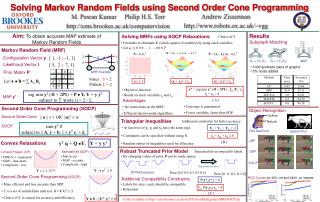
Second Order Cone Programming for Robust Localization in Mobile Sensor Networks Ghasem Naddafzadeh-Shirazi Lutz Lampe
Sensor Localization problem Given location of K anchors and the pair-wise distance measurements of N-K nodes, estimate their location. Presence of noise in measurements: NP-hard in general Convex relaxations
Second Order Cone Programming (SOCP) vs. Semidefinite Programming (SDP) for the Sensor Localization Problem
Robust SOCP Localization Problem Extra constraints on anchor estimated positions Uncertainty in anchor positions: u = vector of t_ij s and s_i s Definition: Tight Links satisfy (1e) with equality. Convex relaxation
Tight Links – Tight Nodes Property 1: Node Unambiguous IFF it has at least one Tight link [Tseng] Also true for robust scenario [Shirazi] Property 2: SOCP Location estimates are inside the neighbour / anchors (estimated) convex hull [Tseng]
Mobile Sensor Networks Formation Control Initial location uncertainty Ambiguous nodes can make the final formation erroneous “Move to Tighten” tight neighbours
1 non-tight node [Derenick] Shape: Ax=0 a0<=Angle<= a1 Scale < s0
Mobile Sensor Networks Boundary Trespassing Detection Settings: Fixed anchors Mobile sensors “Detect Movements close to convex hull edges” Entering the c.h. Exiting
Threshold = 5m. 83 % detection 13 % false alarm
Threshold = 2m. observe the tradeoff (83% and 13% for 5m) 60 % detection 7 % false alarm
Conclusions Robust SOCP properties applied to the localization of mobile networks. Reduce the unambiguity in formation control. Detect boundary entering/exiting.
References [Tseng] P. Tseng, “Second-order cone programming relaxation of sensor network localization,” SIAM Journal on Optimization, vol. 18, no. 1, pp. 156–185, Feb. 2007. [Derenick] J. C. Derenick and J. R. Spletzer, “Convex optimization strategies for coordinating large-scale robot formations,” IEEE Trans. Mobile Comput., vol. 23, no. 6, Dec. 2007. [Shirazi] G. Naddafzadeh Shirazi, M. Shenouda, and L. Lampe, “Second-order cone programming for robust sensor network localization”, to appear in IEEE T-WC.