Download
1 / 14
140 likes | 163 Views
Explore methods for finding good equivalences and alignments in structures using superposition techniques. Learn about Root Mean Square Deviation (RMSD) scoring for transformations.

E N D
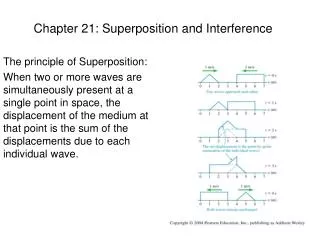
Chapter 9 Superposition and dynamic programming Most methods for comparing structures use some sorts of superposition and dynamic programming We have two structures A and B with elements in a given order A = A1 A2 ... Am and B = B1 B2 ... Bn An equivalence for (A, B) is a set of pairs of elements (Ai1, Bj1) (Ai2, Bj2) ... (Air, Bjr) If i1<i2<...<ir and j1<j2<...<jr then the set of pairs is an alignment We shall look at methods for finding ”good” - equivalences - alignments Chapter 9 Superposition and Dynamic Programming
Superposition • Determine how ”good” an equivalence is: • Put the structures on top of each other, and see how good the equivalent pairs fit each other in the space, when translation and rotation are allowed • If the geometry of the structures are not changed, this is called rigid body superposition • Let B be fixed in space • Transform A with a transformation T over B • We can measure how good T is by giving a score to the resulting superposition by measuring the root mean square deviation (RMSD) between the equivalent pairs of (transformed ) A and B • Low RMSD values are best, zero indicates exact equality between the (sub)structures Chapter 9 Superposition and Dynamic Programming
Root Mean Square Deviation Two different measures are mainly used for scoring the transformation (superposition) • Coordinate RMSD • Distance RMSD Chapter 9 Superposition and Dynamic Programming
Coordinate RMSD • Let (a1,b1) ,..., (ar,br) be the coordinate set (three values each) of the equivalent elements of the equivalence E • The problem is then to find a transformation T for A which minimizes the coordinate root mean square deviation, that is where wi are weights corresponding to each pair (ai,bi), and often set to one. • A transformation can be performed by • A translation (three distances) • A rotation (three angles, around the x-, y-, z-axis) • The rotation can also be performed around one axis, the direction of which has to be calculated for each rotation Chapter 9 Superposition and Dynamic Programming
Coordinate RMSD, cont’ • A transformation for the minimum RMSD can be found by • Shift the centroids (geometrical centres) of each structure to the origin of a common coordinate system • Find the rotation of A that minimizes the RMSDC • A rotation around the origin can be described by an orthogonal matrix R3,3 (3D space) with determinant equal to 1 • There exist equations describing the connections between the angles (3) and the values of the matrix (9) • A matrix is orthogonal if • The scalar product of any two different columns is 0 • The scalar product of any column with itself is 1 • The deteminant of a 3 x 3 matrix R with elements {rij} is calculated as r11r22r33 + r12r23r31 + r13r21r32 - r11r23r32 - r12r21r33 - r13r22r31 Chapter 9 Superposition and Dynamic Programming
Coordinate RMSD, cont’ • The orthogonal requirement is for assuring that the distances between the points are not changed (ridig body) • The determinant requirement is for not ”reflecting” (”mirrorring”) the structure Chapter 9 Superposition and Dynamic Programming
Example • A point (1, -1, 1) are to be rotated by an orthogonal matrix with deteminant equal to one • Show that the matrix is orthogonal • Show that the determinant is one • Find the new coordinates Chapter 9 Superposition and Dynamic Programming
Coordinate RMSD, cont’ • The formula can therefore be described by a rotation matrix R and a translation vector t, and we search for a pair (R,t) which minimizes the expression (assuming wi=1) • Since t is found by moving to common centroids, the problem can be formulated as finding the orthogonal matrix, with determinant one, that minimizes the function where (a1,b1) ,..., (ar,br) are now the coordinates after the structures are moved to common origin • Algorithms exist for finding such a matrix Chapter 9 Superposition and Dynamic Programming
Distance RMSD • The distance score method measures how equal corresponding pairwise distances in the two structures are • It alleviates the need for finding a translation and rotation of one of the structures, and is therefore faster where dijA is the spatial distance between the elements of A in pairs i and j of the equivalence • However, it has a (serious) weakness, it is invariant under reflection • The two measures are experimentally shown to have a close to linear relation Chapter 9 Superposition and Dynamic Programming
Using RMSD as scoring of structure similarities • The problem of pairwise structure comparison is often to find equivalences with low RMSD values • Several quite different equivalences with similar scores might be found, which one is ”correct” is often not easy to determine • However, always consider the number of elements in the equivalences • for random comparisons the expected RMSD values seems to be proportional to the square root of the number of equivalent residues • Different measures can then be used for evaluating how well two structures can be superposed Chapter 9 Superposition and Dynamic Programming
Using RMSD as scoring of structure similarities Chapter 9 Superposition and Dynamic Programming
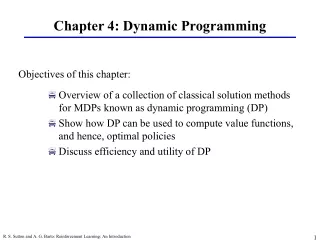
Comparison methods using superpositon and dynamic programming • Dynamic programming cannot be directly used for structure comparison • Two different approaches are used for combining superposition and dynamic programming • Alternating superposition and dynamic programming • ”Contemporary” superposition and dynamic programming Chapter 9 Superposition and Dynamic Programming
Alternating superposition and dynamic programming p:=0, Eo:= an initial equivalence (sometimes subalignment required) iter find the transformation Tp for min RMSD, using the r pairs in Ep use Tp on the whole structure A, giving A* calculate a scoring matrix Rij as function of the distance between residue i in A* and residue j in B find the best alignment P with use of R (use dynamic programming) p:=p+1 Ep:= the r pairs in P with shortest distances in R untilEp=Ep-1orp<pmax P now contains a found equivalence (or alignment) Chapter 9 Superposition and Dynamic Programming
Alternating superposition and dynamic programming, cont’ The scoring matrix can have more components, in addition to the distance • Sequence component, how similar are the amino acids? • How similar are the local environments? Number of pairs in each equivalence • Instead of a fix number for r, r can vary with the number of ”overlapping” pairs Chapter 9 Superposition and Dynamic Programming