Download
1 / 23
230 likes | 313 Views
Controlling Uncertainty in Personal Positioning at Minimal Measurement Cost. * Hui Fang, * Wen-Jing Hsu, and ' Larry Rudolph * Singapore-MIT Alliance Nanyang Technological University ' MIT. Outline. Background & introduction Problem statement Location inference model

E N D
Controlling Uncertainty in Personal Positioning at Minimal Measurement Cost *Hui Fang, *Wen-Jing Hsu, and ' Larry Rudolph *Singapore-MIT AllianceNanyang Technological University ' MIT UIC08
Outline • Background & introduction • Problem statement • Location inference model • Energy-saving strategies • Conclusion UIC08
Personal mobile positioning devices GPS 2008-01-23 19:51:46 CellID=(525, 5, 12, 51153) GPS=(1.34690833333333, 103.678925) 2008-01-23 19:53:06 CellID=(525, 5, 12, 13901) GPS=(1.34690833333333, 103.678925) 2008-01-23 19:55:46 CellID=(525, 5, 12, 51683) GPS=None 2008-01-23 19:55:51 CellID=(525, 5, 12, 51683) GPS=(1.34690833333333, 103.678925) 2008-01-23 19:55:56 CellID=(525, 5, 12, 51683) GPS=(1.34690833333333, 103.678925) Cell tower GPS/Cell-ID records Mobile device UIC08
Uncertainty in Positioning Measurement • Certainty of position estimate A cell tower ID covers a larger area GPS, error 3-5 meters GPS > Cell-ID • Cost. Battery-energy consumption per probe. GPS > Cell-ID UIC08
Problem statement Goal • Estimate a mobile user's actual position at a given point of time by individualized means Requirements • Sufficient certainty (i.e. above threshold) on estimates • Efficient on energy consumption UIC08
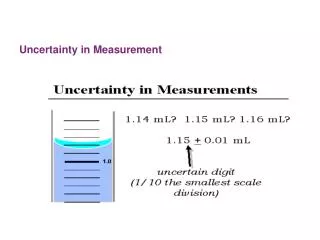
Representation of a positional estimate A positional estimate is a 2-D Gaussian random variable z. • σ is a standard deviation reflecting uncertainty. • u is the best estimate of the actual locationz. y (u,σ) 68.3% chance staying in circle (radius=σ) 0 x UIC08
Combining two estimates • Given two estimates (u, V1) and (v,V2) • New estimate The new estimate is closer to the one with greater certainty; The certainty of new estimate increases. UIC08
Movement model • Position xk at time tk • Measurement zk Involved noises: wk velocity noise rk measurement noise t3 t1 t0 t2 We assume:*user follows a given journey *velocity noise is also Gaussian A journey with 5 measurements over time [t0,t3] UIC08
Estimate new position over time • Given:xk, last positionτk , time elapse vk Vw , velocity mixed with noise • New estimatexk+1 advance to k+1 time step * Estimate becomes more uncertain over time; * Uncertainty curve is non-linear. UIC08
Complete location inference model • Measurement update • Prediction update More details, refer to: [1]An introduction to the Kalman filter. G.Welch et al. 2001 [2]Simultaneous GPS and Cell-ID Records for Personal Positioning and Location Inferences. H. Fang et al., 2007 UIC08
Energy saving versus certainty • Estimate is safe when its uncertainty (denoted by standard deviation σ) is smaller than a threshold • Each positioning probe costs a portion of battery-energy • Problem: minimize the overall cost while keeping all the estimates safe • Trade-off? UIC08
Measurement strategies • Question: For one type of device, how does certainty change when carrying out probes periodically? Probe A Probe A Probe A ΔT = constant time UIC08
Periodic probing • Given a fixed probe time interval Δt, we infer the new uncertainty curve σk+1 σk+1 Δt Note: σw velocity noise σrk+1 measurement noise σk uncertainty at time step k UIC08
Periodic probing (cont’d) • We further showed that when periodic probing • Certainty will converge to a fixed value with any initial estimate • In order to keep certainty non-decreasing, • either measurement must be sufficiently precise, • or the time interval small. * * Minimum probe frequency f, UIC08
Probe strategy with 2 types of devices • Two types of positioning devices available, probes A and B with diff. costs and certainty A B • Decision problem Which probe type to use, A or B? When to carry out probes? How many probes each time? time t0 t1 t2 UIC08
Extending the safe duration of a journey Safe duration: the portion of time while estimate uncertainty is below the threshold, in a journey of time T. Overlapped probes: when probe A is carried out in the middle (endpoint excl.) of probe B’s safe duration, they are overlapped. uncertainty Connected probes: when probe A is carried out at the end of probe B’s safe duration, they are called connected. UIC08
Lazy probing strategy • Question: When 2 probes available, what timing strategy leads to the total longest safe duration? • We showed that lazy probing strategy is best • the non-overlappedand connected probing sequence achieves the longest safe duration. • Each probe starts only after the previous one runs out its safe duration. threshold lazy T1 > T2 overlapped UIC08
Choosing right probe timing & type • Probe timing • Lazy probing strategy (for multi probes) is best . When the estimate is still safe, it is better to keep lazy. • Probe type • We showed that: When initial uncertainty equals to threshold, two lazy probes can change the order without reducing safe duration. UIC08 Safe duration
Choosing the right probe type • We showed:All min-cost safe probe sequences are equivalent to one of • A...AB...B • B...BA...A A Cost(S) = ΣN1 C(A) + ΣN2 C(B) B ABAB AABB UIC08
Algorithm of computing an optimal strategy Compute safe duration of probe A and B, ta, tb; N1 = T/ ta, seq* = None, cost* = inf for i = 1 to N1: j = [(T- i*ta )/ tb] seq = {A1…Ai B1…Bj} If cost (seq) < cost*: seq* = seq cost* = Σicost(A) + Σjcost(B) return seq* UIC08
Computing an optimal strategy We showed: • A min-cost probe sequence can be obtained by comparing at most N1+N2 candidates. • Further, the min-cost solution can be found in both N1 set and N2 set. • Time complexity. min(N1 , N2)is needed UIC08
Conclusion Based on our position inference model, we present: • Optimal probing strategies for • Integrating measurements from multiple positioning devices • minimizing energy while maintaining the estimate certainty UIC08
Questions Thank you! Fang Hui Nanyang Technological University fang0025@ntu.edu.sg UIC08