Download
1 / 20
200 likes | 367 Views
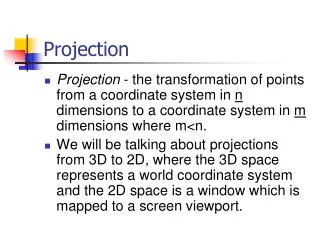
Projection-free Online Learning. Dan Garber Elad Hazan. Matrix completion. Super-linear operations are infeasible!. x 2. f 1. x 1. Online convex optimization. Incurred loss. f 1 (x 1 ). f 2. f 2 (x 2 ). f T (x T ). linear (convex) bounded cost functions

E N D
Projection-free Online Learning Dan Garber Elad Hazan
Matrix completion Super-linear operations are infeasible!
x2 f1 x1 Online convex optimization Incurred loss f1(x1) f2 f2(x2) fT(xT) • linear (convex) bounded cost functions • Total loss = tft(xt) • Regret = tft(xt) - minx*tft(x*) • Matrix completion: set = low rank matrices, Xij = prediction user i movie jfunctions: f(X) = |X * Eij - ±1|^2
Online gradient descent The algorithm: move in the direction of the vector -ct(gradient of the current cost function) yt+1 ct xt+1 xt yt+1 = xt- ct and project back to the convex set Thm [Zinkevich]: if = 1/ t then this alg attains worst case regret of tft(xt) - tft(x*) = O( T)
Computational efficiency? Gradient step: linear time Projection step: quadratic program !! Online mirror descent: general convex program The convex decision set K: • In general O(m½ n3 ) • Simplex / Euclidean ball / cube – linear time • Flow polytope – conic opt. O(m½n3) • PSD cone (matrix completion) – Cholesky decomposition O(n3)
Matrix completion Projections out of the question!
Computationally difficult learning problems • Matrix completion K = SDP coneCholesky decomposition • Online routing K = flow polytopeconic optimization over flow polytope • RotationsK = rotation matrices • MatroidsK = matroidpolytope
Results part 1 (Hazan + Kale, ICML’12) • Projection-less stochastic/online algorithms with regret bounds: • Projections <-> Linear optimization • parameter free (no learning rate) • sparse predictions
Linear opt. vs. Projections • Matrix completion K = SDP coneCholesky decomposition largest singular vector • Online routing K = flow polytopeconic optimization over flow polytopeshortest path computation • RotationsK = rotation matricesconvex opt.Wahba’s alg.
The Frank-Wolfe algorithm vt+1 xt+1 xt
The Frank-Wolfe algorithm (conditional grad.) Thm[ FW ’56]: rate of convergence = 1/Ct (C = smoothness) [Clarkson ‘06] – refined analysis [Hazan ‘07] - SDP [Jaggi ‘11] – generalization vt+1 xt+1 xt
The Frank-Wolfe algorithm • At iteration t – convex comb. of <= t vertices = ((t,K)-sparse • No learning rate. Convex combination with 1/t (indep. Of diameter, gradients etc.) vt+1 xt+1 xt
Online Conditional Gradient (OCG) xt xt+1 vt+1
Projections <-> Linear optimization • parameter free (no learning rate) • sparse predictions • But can we get the optimal root(T) rate?? • Barrier: existing projection-free algs were not linearly converging (poly-time)
New poly-time projection free alg[Garber, Hazan 2013] • New algorithm with convergence~ e-t/n rateCS: “poly time” Nemirovski: “linear rate” • Only linear optimization calls on the original polytope! (constantly many per iteration)
Linearly converging Frank-Wolfe vt+1 xt+1 xt • Assume optimum is within Euclidean distance r: • Thm[ easy ]: rate of convergence = e-t • But useless: under a ball-intersection constraint – quadratic optimization equivalent to projection
Polytopes are OK! • Can find a significantly smaller polytope (radius proportional to Euclidean distance to OPT) that: • Contains x* • Does not intersect original polytope • same shape
Implications for online optimization • Projections <-> Linear optimization • parameter free (no learning rate) • sparse predictions • Optimal rate
More research / open questions • Projection free alg – for many problems linear step time vs. cubic or more • For main ML problems today – projection-free is the only feasible optimization method • Completely poly-time (log dependence on smoothness / strong convexity / diameter) • Can we attain poly-time optimization using only gradient information? Thank you!