Download
1 / 14
140 likes | 292 Views
Towards Accurate and Robust Map-aid Indoor Human Tracking. Speaker : Peisen Zhao, Tsinghua University. Co-authored :. Chunxiao Jiang, Tsinghua University. Hongyang Chen, The University of Tokyo. Yong Ren , Tsinghua University. Indoor Human Localization. Outdoor. Indoor.

E N D
Towards Accurate and Robust Map-aidIndoor Human Tracking Speaker: PeisenZhao, Tsinghua University Co-authored: Chunxiao Jiang, Tsinghua University. Hongyang Chen, The University of Tokyo. Yong Ren, Tsinghua University Towards Accurate and Robust Map-aid Indoor Human Tracking, IWCMC’12, Cyprus
Indoor Human Localization Outdoor Indoor : Satellite Signal Unavailable RSSI Widely supported Specialized Hardware Global Positioning System Wi-Fi Cricket Active Badge Wireless Sensor Network Galileo Positioning System Towards Accurate and Robust Map-aid Indoor Human Tracking, IWCMC’12, Cyprus
Anisotropic Environment RSS-DistanceRelationship Ideal Anisotropic ) ) Multi-path Effect Towards Accurate and Robust Map-aid Indoor Human Tracking, IWCMC’12, Cyprus
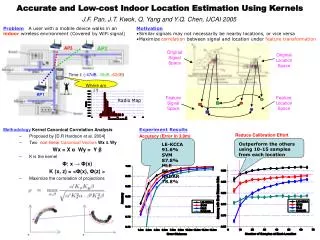
Anisotropic Environment Fingerprint Map Approach Using Auxilliary Input Using Prior Knowledge • Precisely capture RDR • High Localization Accuracy • Online Calibration Methods • Automatic Generation • Vulnerable to environment changes • Human Supervision • Limited Calibration Ability • Lower accuracy when automatically generated • GPS signal received by chance • Inertial Measurement Unit • Acceleration Sensor • Camera • User Interaction • RFID Tags • Cross AP Measurements • Floor plan • Human Walking Model • Position of AP • Preset Course • Fingerprint Database Efficiency Accuracy Incorporate More Knowledge Towards Accurate and Robust Map-aid Indoor Human Tracking, IWCMC’12, Cyprus
Map-aid Particle Filter • Invalid particles: • Crossing hard obstruction • Reaching unreachable area Particle Filter initial particle set. (3) For every time step • State prediction • State prediction (4) (1) • Re-sampling human walking model Avoid: Particle Degradation Sample Impoverishment if • Weight update (5) Map-Aid Technique Systematic Resample[1]. basically: Clone particles with larger weight Eliminate particles with smaller weight (2) [1]. S. Arulampalam, S. Maskell, N. Gordon and T. Clapp, “A Tutorial on Particle Filters for Online Nonlinear/Non-Gaussian Bayesian Tracking,” IEEE Trans. on Signal Process., pp. 174–188, vol. 50, no. 2, 2002. Towards Accurate and Robust Map-aid Indoor Human Tracking, IWCMC’12, Cyprus
Acute Sample Impoverishment new particles concentrate only on a few adjacent spots, which means the information capacity of the particle set is seriously reduced. More Powerful Resampling! Towards Accurate and Robust Map-aid Indoor Human Tracking, IWCMC’12, Cyprus
Observation Noise Vulnerability More Information! determined arbitrarily by Towards Accurate and Robust Map-aid Indoor Human Tracking, IWCMC’12, Cyprus
Location Factor • Grid Map • Higher Location Factor = More likely to be visited • Can be generated by software with floor plan Towards Accurate and Robust Map-aid Indoor Human Tracking, IWCMC’12, Cyprus
Immune Location Factor Particle Filter 1. 2. : transitional zone width : basic tolerance Alleviate Observation Noise Vulnerability: Involve Location Factor into calculation of affinity Towards Accurate and Robust Map-aid Indoor Human Tracking, IWCMC’12, Cyprus
RMS Resampling (2) (1) (3) Alleviate Acute Sample Impoverishment: Strong ability to recover a full, divergent particle set Towards Accurate and Robust Map-aid Indoor Human Tracking, IWCMC’12, Cyprus
Simulation Scenario • Obtainwith triangulation • Apply different particle filters with same Towards Accurate and Robust Map-aid Indoor Human Tracking, IWCMC’12, Cyprus
In environments with many obstructions, map-aid technique can even worsen the result without proper resampling Simulation Results Towards Accurate and Robust Map-aid Indoor Human Tracking, IWCMC’12, Cyprus
Conclusion and Future Work • In this work, two major problems of the standard map-aid particle filter are analyzed, i.e. the acute sample impoverishment problem and the observation noise vulnerability problem. An Immune Location Factor Particle Filter is proposed to address these problems, which features robust re-sampling strategies utilizing the Clonal Selection Algorithm. When combined with our Location Factor Grid, the calculated trajectory will be calibrated to fit human trajectory even more accurately. In simulations, a 36% improvement of accuracy over standard particle filters can be achieved at best. • Combine prior work and conduct experiment Towards Accurate and Robust Map-aid Indoor Human Tracking, IWCMC’12, Cyprus
Thank you very much! Towards Accurate and Robust Map-aid Indoor Human Tracking, IWCMC’12, Cyprus