Download
1 / 55
550 likes | 652 Views
Direct Methods for Visual Scene Reconstruction. Presented by Kristin Branson November 7, 2002. Paper by Richard Szeliski & Sing Bing Kang. Problem Statement. How can one extract information from a sequence of images without camera calibration?. World Model. Sequence of images.

E N D
Direct Methods for Visual Scene Reconstruction Presented by Kristin Branson November 7, 2002 Paper byRichard Szeliski & Sing Bing Kang
Problem Statement • How can one extract information from a sequence of images without camera calibration? World Model Sequence of images
Panoramic Mosaicing Image Sequence
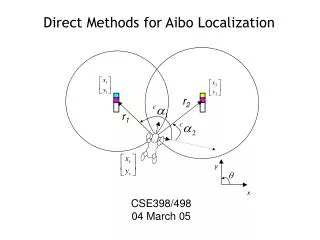
Projective Depth Recovery Image Sequence a b da1 db1 3 1 2
Ambiguity What does the 3-D structure look like?
Ambiguity What does the 3-D structure look like? d4 d2 d3 d1
Ambiguity What does the 3-D structure look like? d4 d2 The projective depth is defined up to a projective transform. d3 d1
Ambiguity What does the 3-D structure look like?
Outline • Image transformations. • Direct methods for image registration. • Mosaic construction. • Projective depth recovery.
2D Transformations Planar Scene How does the square look when we move the camera? Image Plane
Types of Transformations 2D Examples Rigid Rigid+Scaling • Affine Projective
Mathematically • The 2-D planar transformation p’ of point p is p p’ M2D =
3-D Rigid Transformations How do u and u’ relate? u’ 3-D Scene u Rotation + translation
Mathematically • Calculate the world coordinate p from an image coordinate u: • Calculate image coordinate u’ from p: Viewing matrix M
Panoramas • What if the optical center of the camera does not move? • The images are related by a homography.
Direct Image Registration • For a pair of images, I and I’, minimize the intensity discrepancy
Nonlinear Iterative Minimization • At the minimum of E, Jacobian
Nonlinear Iterative Minimization • At the minimum of E, • Given some estimate of find s.t. • Update : , where Hessian
Levenberg-Marquardt • The Hessian is hard to calculate. • Approximate it as • Levenberg-Marquardt finds locally optimal solutions.
Calculate Ma Mc M Ma Mb Mb Mc Subsample Image I’ Image I Hierarchical Matching Pyramid of image I Pyramid of image I’
Mosaic Construction • How do we stitch together the registered images? • One approach: • Choose one frame’s coordinate system. • Warp all frames into that coordinate system. • Blend together overlapping sections by averaging.
Environment Maps • Color each face a different color. • Unroll into a 2D texture map
Environment Maps • Expand each face.
p2 p1 u2 u1 u4 p3 u3 Environment Maps • For each face, determine the mapping to world coordinates s.t. ui= MFpi
Environment Maps • Warp each image to the coordinate system of each face. • For each face, form a blended image. • Paint the blended image faces into the 2D texture map. • This method can be performed for arbitrary surfaces, including a tesselated sphere.
Inconsistencies at frame boundaries Blending • How do we choose pixel values in the mosaic where the images overlap? • Superimposing method:
Blending • How do we choose pixel values in the mosaic where the images overlap? • Weighted averaging:
Blending • How do we choose pixel values in the mosaic where the images overlap? • Weighted averaging: • Overlapping images are averaged, weighted by distance from the center.
Blending • How do we choose pixel values in the mosaic where the images overlap? • Multi-resolution blending: • Overlapping images are averaged, weighted by proximity to desired zoom.
Projective Depth Recovery • Earlier, we saw that if two cameras are related by a 3-D rigid transformation,
Projective Depth Recovery • Earlier, we saw that if two cameras are related by a 3-D rigid transformation, Image coordinate in I’ Translation from O to O’ Projective depth Homography Viewing matrix for I’ Image coordinate in I
Projective Depth Recovery • Earlier, we saw that if two cameras are related by a 3-D rigid transformation, Image coordinate in I’ Projective depth Parallax motion Homography Image coordinate in I
Projective Depth Recovery • Earlier, we saw that if two cameras are related by a 3-D rigid transformation, Image coordinate in I’ Projective depth Parallax motion Homography Image coordinate in I
Algorithmic Idea • Choose a base frame I0to recover projective depth in. • Find Mj, , and di to minimize using nonlinear iterative minimization.
Number of Parameters • How many parameters must we estimate? • (8 + 3) n + p, where n is the number of images and p is the number of pixels. • p is large, so the depth map is represented using a tensor-product spline.
Depth j i Splines Depth Map Spline Let the depths at the control vertices vary. Find the depths at all points by interpolation. Spline control vertex Pixel (i,j)
Local Minima • The high dimensionality of the search space increases the chance of finding a nonglobal optimum. • One solution is to initialize the dense algorithm with the results of a feature-based algorithm.
Feature-Based Algorithm • Detect features, for example corners, in each frame. • Find between-frame feature correspondences.
Feature-Based Algorithm • Now we have the locations of each feature i in each frame j,vij. • Find the transformation (Mj, , di) to minimize through nonlinear iterative minimization.
Feature-Based Algorithm • Now we have the locations of each feature i in each frame j,vij. • Find the transformation (Mj, , di) to minimize through nonlinear iterative minimization. Inverse variance weight Location of feature i in base frame
Algorithm Initialization • Simple approach: initialize • Faster approach: • Fix and , then solve for Mj. • Estimate and
Input image Novel image Input image Virtual camera View Interpolation
View Interpolation • We can approximate the Euclidean depth map from the projective depth map. • From the Euclidean depth map, we can synthesize novel views of a scene.