Download
1 / 8
260 likes | 697 Views
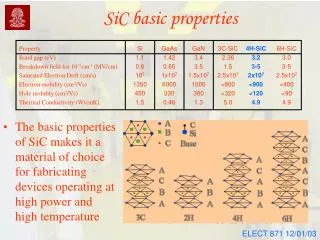
Basic System Properties. Memory Invertibility Causality Stability Time Invariance Linearity. Memory. Memoryless output for each value of independent variable at a given time is dependent on the input at only that same time y[n] = 2*x[n] - x^2*[n] memoryless

E N D
Memory • Invertibility • Causality • Stability • Time Invariance • Linearity
Memory • Memoryless • output for each value of independent variable at a given time is dependent on the input at only that same time y[n] = 2*x[n] - x^2*[n] memoryless • Capacitor is a C-T system with memory • In physical systems memory is directly associated with the storage of energy • y[n] = x[n-1] memory • D-T systems implemented with uP, memory is associated with storage registers • Memory typically suggests storing past values but definition covers systems with outputs dependant upon future values of input and output
Invertibilty & Inverse • Invertible • Distinct inputs lead to distinct outputs y[n] = 2*x[n] inverse system is y[n] = ½*x[n] • Noninvertible systems • y[n] = 0 violates distinct outputs • y(t) = x^2(t) can’t tell sign of input from the output • Encoding/Decoding • Lossless compression
Causality • Non-anticipative • Depends only on present and past values of inputs • Non-causal • output has a value before input • output responds to an input that hasn't occured yet • Causal y[n] = y[n-1], y[n] = Sk=-inf to n x[k] • Non-causal y[n] = x[n] – x[n+1], y(t) = x(t+1) • All Memoryless systems are causal – Why? • Causality not a constraint in image processing • In processing signals recorded previously (speech, geophysical, meterological) we are not constrained to causal processing • y[n] = x[-n] causal for n > 0 but what about n < 0? • y(t) = x(t)*cos(t+1) causal or noncausal?
Stability • Stable system • Small inputs lead to responses that do not diverge • Stable – pendulum • Unstable – inverted pendulum, bank account • BIBO – Bounded Input = Bounded Output • If we suspect a system is unstable • Look for a specific bounded input that leads to an unbounded output • One example proves unstable • If one example difficult to find use a different method • Try unit step on y(t) = tx(t)
Time Invariance • Behavior and characteristics fixed over time • R C circuit – same results today as tomorrow • System is Time Invariant if • A time shift in the input signal results in • Identical time shift in the output signal • A system is Time Invariant if • y[n]=x[n] and y[n-n0]=x[n-n0] • Examples • y(t) = sin[x(t)] • use t-t0 concept to prove • y[n] = nx[n] • use x[n]=d[n] & x[n]=d[n-1] to disprove • y(t) = 2x(t) ?
Linearity • A linear system is a system that possesses the important property of superposition • The response to x1(t) + x2(t) is y1(t) + y2(t) • The response to ax1(t) is ay1(t) • where a is any complex constant • Systems can be Linear without being Time Invariant • Systems can be Time Invariant without being Linear