Download
1 / 34
340 likes | 348 Views
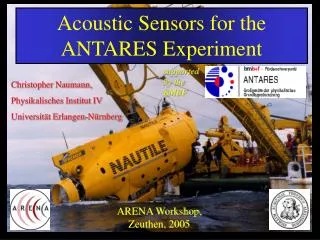
Status and First Results of the Acoustic Detection System AMADEUS in ANTARES. Robert Lahmann for the ANTARES Collaboration ARENA 08, Rome, 26-June-2008. Outline. Overview of AMADEUS Technical implementation of AMADEUS First results Conclusions. Overview of AMADEUS. . hadronic cascade.

E N D
Status and First Results of the Acoustic Detection System AMADEUS in ANTARES Robert Lahmann for the ANTARES Collaboration ARENA 08, Rome, 26-June-2008
Outline Overview of AMADEUS Technical implementation of AMADEUS First results Conclusions
hadronic cascade ≈10m ≈1km Expect detection threshold E > 1018 eV (1 EeV) ~ Reminder: Acoustic Signals from Neutrinos Temperature Instantaneous heating, followed by slow cooling Ecasc= 1 EeV @ 1km Adapted from arxiv/0704.1025v1 (Acorne Coll.)
Acoustic Background in the Sea Random noise Neutrino-like events A Bipolar Pressure Signals (BIPs) Have to measure correlated BIP rate: Adapted fr. astro-ph/0104033 (Lehtinen et al.) • Hydrophone array required • Hydrophone synchronisation crucial • One Hydrophone in principle sufficient • Hydrophone synchronisation not crucial
Goals of the AMADEUS Project • Feasibility study for future large scale acoustic detector • Background investigations (rate of neutrino-like signals, localisation of sources) • Investigation of signal correlations on different length scales • Tests of different hydrophones and sensing methods • Development and tests of filter and reconstruction algorithms • Studies of hybrid detection methods
The Acoustic Detection System AMADEUS Concept: Local clusters at large distances • 6 Hydrophones on 1m scale: • Local coincidences for suppression of uncorrelated background • Reconstruct direction of source • 6 clusters with a total of 36 sensors • Spacings between clusters from 15m to 340m
The AMADEUS System • Taking data since 5-Dec-2007 • Completely installed since 30-May-2008
Overview of Acoustic Sensors • 19 commercial hydrophones: all working • 11 self-made hydrophones: 9/11 working • 3 Acoustic Modules (6 acoustic sensors): all working • 34/36 sensors working in total • Typical sensitivity of hydrophones: -145 dB re. 1V/Pa
Features of AMADEUS • Full detector capabilities (time synchronisation, DAQ,…) • Combines local clusters of acoustic sensors with large cluster spacing • Designed to make use of standard ANTARES hard- and software as much as possible • All data to shore (but off-shore pre-trigger possible) • Triggered data (on-shore) ~10 GByte/day • Continuous data taking with (currently) ~80% uptime
AMADEUS Uptime takeover of sector control DB problems ANTARES completed! deployment L11 and L12
~10cm Setup of Acoustic Storey with Hydrophones Hydrophone:Piezo sensorwith pre-amplifierand band pass filter in PU coating Titanium cylinderwith electronics 3 custom designed Acoustic ADC boards
Characteristics of the Acoustic ADC boards 3 Acoustic ADC boards (AcouADC boards) used per storey, each processing 2 sensors • 16 bit digitisation (-2V to +2V) • Bandwidth up to ~125 kHz • Adjustable digitisation rate, max. 500 kSamples/s(Currently using downsampling 2: 250 kSamples/s transmitted to shore, i.e. 3MByte/s for 6 hydrophones) • System extremely flexible due to use of FPGA off-shore (downsampling, adjustable gain 1 to 562, off-shore firmware updates possible)
System Response Function Hydrophone (piezo+preamp) Filter (analog+digital), amplifier System response measured in lab prior to deployment for each individual component
frequency domain dB (V/V) transfer spectrum (raw) dB re 1µPa/V sender dBre 1V/µPa corrected sensitivity characteristics frequency (kHz) log frequency (kHz) Hydrophone Sensitivity Measurement - Principles voltage pulse sent amplitude (V) log frequency (kHz) received time(µs)
Directional Calibration of Hydrophones - Freq sensitivity - freq sensitivity Sensitivity measured with calibrated hydrophone, confirmed with reciprocity method In-situ measurements planned
20 10 0 -60 -80 -100 PSD (dB re 1V2/Hz) Phase (rad) 0 100 200 Frequency (kHz) 0 100 200 Frequency (kHz) Calibration of AcouADC board • Calibration of : Amplification, non-linearities, frequency response, … • System functions parameterised Excellent system stability, fluctuations at %-level
Signal Response of AcouADC Board Very good agreement between real and modelled system response
The Onshore Filter System Task:Reduce incoming data rate of ~1.6 TByte/day to ~10 GByte/day System extremely flexible, all components scalable Allows for coincidence triggers on several hydrophones Local clusters (storeys) big advantage for fast (on-line) processing Acoustic servers: 4 servers in total, 2 for filtering: 2 Dualcore,3 GHz 2 Quadcore, 3 GHz Details in talk by M. Neff
Correlation with Weather Conditions Hydrophone noise integrated from 1 to 50 kHz Windspeed (kt): Mean=9.4 kt preliminary preliminary (mPa) Weather conditions measured at Hyères airport, about 30km north of ANTARES site • Correlation coefficient ~ 80% • Deep-sea noise dominated by sea surface agitation
Power Spectral Density of Background Noise Data from two month: preliminary Lab measurement Observed background noise in deep sea basically as expected
Noise distribution in dependence of wind speed Exemplary 10s-slices preliminary
Pinger of ANTARES Positioning System (I) Pinger of ANTARESpositioning systemare also used for positioning of acoustic storeys(work in progress)
Pinger of ANTARES Positioning System (II) • Pinger signal: • Amplitude reduced with distance • Temporal structure (1st and 2nd ping originate from different positions)
Pinger Signals: Comparison of AMs and Hydrophones AMs Hydros
Localisation of Transient Signals Reconstruction of sourcedistance with triangulationfrom several storeys Most probabledirection of source Details in talk by C. Richardt
Conclusions • AMADEUS performance is excellent • The AMADEUS system has all features of an acoustic neutrino telescope (except size) • Can be used as a multi purpose device (studies of neutrino detection, positioning,…) • “Acoustic Modules” are an option for acoustic measurements without additional mechanical structures Funded by:
Acoustic Storeys on Line 12 Deployment May 2008 Storey 21 (3 “Acoustic Modules”, 6 sensors in total) Storey 22 (6 commercial sensors) Storey 23 (6 sensors produced at Erlangen)
Acoustic Storeys on the IL07 Deployment July 2007 Storey 2 (6 commercial sensors) Storey 3 (6 sensors produced at Erlangen) Storey 6 (6 commercial sensors)
Acoustic Modules Piezo sensors + preamplifiers Design allows for integration of acoustic sensors into pressure housing of photo sensors No need for additional mechanical structures