Download
1 / 23
450 likes | 2.06k Views
3-D Transformations. Brian Romsek Senior Student Surveying Engineering Department. Y Axis. Z Axis. X Axis. Three-Dimensional Conformal Coordinate Transformation. Converting from one three-dimensional system to another, while preserving the true shape .

E N D
3-D Transformations Brian Romsek Senior Student Surveying Engineering Department
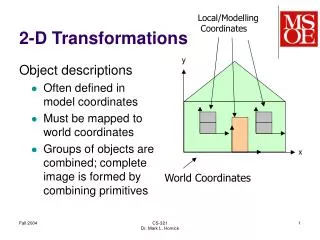
Y Axis Z Axis X Axis Three-Dimensional Conformal Coordinate Transformation • Converting from one three-dimensional system to another, while preserving the true shape. • This type of coordinate transformation is essential in analytical photogrammetry to transform arbitrary stereo model coordinates to a ground or object space system. • It is often used in Geodesy to convert GPS coordinates in WGS84 to State Plane Coordinates.
Applications of 3D Conformal Coordinate Transformations • Mobile mapping systems • Relations between different coordinate frames • Sensor frame • Body frame • Mapping frame
Applications of 3D Conformal Coordinate Transformations • Homeland security • E.G., facial pattern recognition • Image processing
Kappa () Z-axis Y-axis (X,Y,Z) Omega () X-axis Phi () 3D Conformal Coordinate Transformation • Also known as the 7 Parameters transformation since it involves: • Three rotation angles omega (), phi (), and kappa (); • Three translation parameters (TX, TY,TZ) and • a scale factor, S
Rotation angles Omega In general form: In matrix form: More concisely
Kappa () Omega () Phi () Rotation angles Phi In general form: In matrix form: More concisely Z-axis X-axis
Kappa () Omega () Phi () Rotation angles Kappa In general form: In matrix form: More concisely Z-axis X-axis
Combined Rotation Matrix If we combine all the rotation matrices MG becomes, after multiplication
COMPUTING ROTATION ANGLES • If rotation matrix known, rotation angles can be computed as shown on the right
Properties of rotation matrix • The rotation matrix is an orthogonal matrix, which has the property that its inverse is equal to its transpose, or • This can be used for inverse relationship
Y Axis Z Axis X Axis Three-Dimensional Conformal Coordinate Transformation • Finally the 3D Conformal Transformation is derived by multiplying the system by a scale factor s and adding the translation factors TX, TY, and TZ. • Where:
BURSA-WOLF TRANSFORMATION • Geodesy assumption – rotation angles small • cos = 1 • sin = (radians) • Product of two sines = 0 • Rotation matrix R becomes:
BURSA-WOLF TRANSFORMATION • 3D similarity transformation • Observation Equation:
BURSA-WOLF TRANSFORMATION • Coefficient matrix, B: • Vector of parameters, , and discrepancy vector, f
Three Dimensional Coordinates Transformation General polynomial approach: transformation is not conformal
Three Dimensional Coordinates Transformation Alternative that is conformal in the three planes
Three Dimensional Coordinates Transformation Polynomial projective transformation, 15 parameters
Bursa Wolf Linear model – assume small rotation angles Best for satellite to global system transformations Bazlov et al: determined PX 90 to WGS 84 parameters Generalized Bursa Wolf Linear model – errors in both observations and model parameters Useful transforming classical to space-borne (Kashani, 2006) Testing – 4 Methods
Polynomial 1st order Useful when coordinate systems not uniform in orientation or scale Rubber-sheeting Expanded Full- Model Photogrammetric approach Angles not considered small Non-linear: requires a priori estimate of parameters Testing – 4 Methods
Expanded Full-Model • Employed method shown in “Photogrammetric Guide” by Abertz & Kreiling • X, Y, Z coordinates translated to relative values based in mean coordinates
3D Transformations Testing • Data include a set of know control points, transformed from WGS84 system to State Plane Coordinates.
Test Results Reference Variance