Download
1 / 10
100 likes | 208 Views
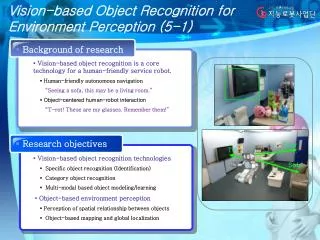
Context-based vision system for place and object recognition. Torralba, Murphy, Freeman & Rubin (2003). Context is useful for object recognition. Local and global image representations. Local representation (L) Wavelet decomposition N = 24 (6 orientations, 4 scales) Global representation

E N D
Context-based vision system for place and object recognition Torralba, Murphy, Freeman & Rubin (2003)
Local and global image representations • Local representation (L) • Wavelet decomposition • N = 24 (6 orientations, 4 scales) • Global representation • Average across space and downsample to M x M (M = 4) • PCA to reduce to 80 dimensions
Place recognition • Transition matrix • Count transitions + Dirichlet smoothing • Observation likelihood • Appearances: mixture of Gaussians • Uniform weights
Dealing with novel places • Separately trained model for categories
Using context for object detection • Estimate probability of object presence using global image features (Objects independent given location and image features)
Context for object localization • Coarse “expectation mask”