Download
1 / 26
260 likes | 403 Views
Robotic Precursor Architectures for Exploration Dr. Butler Hine Small Spacecraft Project Office NASA Ames Research Center Butler.P.Hine@nasa.gov. 1. Objectives.

E N D
Robotic Precursor Architecturesfor ExplorationDr. Butler HineSmall Spacecraft Project OfficeNASA Ames Research CenterButler.P.Hine@nasa.gov 1
Objectives • “The Administrator shall ensure that NASA carries out a balanced set of programs that shall include, at a minimum, programs in— . . . robotic missions to study the Moon. . .” (2005 NASA Authorization Act) • Mitigate risk • Support development of human architecture • Plan for a Robotic Precursor Architecture responsive to Constellation requirements • Flexible, evolutionary, adaptable, and frequent • Generate an agreed-upon forward plan • Create early visibility and accomplishments for the Exploration Vision 2
Introduction • We do not yet have firm requirements for Exploration (nor timing of those requirements) beyond LRO • 2005: Year of the Transportation Architecture • 2006: The year of the Mission Architecture • At a minimum, we know we need: • Good quality global map: • High-Resolution Imagery • Altimetry • Resource Distribution • Communication / navigation infrastructure • Surface Environmental Knowledge • Dust effects on humans and mechanisms • ISRU potential • Radiation environment • Beyond that depends on what we want to do on the moon • The results of the Exploration Strategy/Architecture will tell us that • Goal: Reduce risk, inform human missions, with both flexible and early visibility 3
Key Robotic Mission Drivers • Focus on requirements rather than desires • Launch vehicle availability and use • Commonality and reusability of components • Become smart buyers… know what is possible through internal point designs • Cost competition of robotics within exploration portfolio 4
NASA’s Strategy Vision Strategy Architecture Requirements 7
Exploration Strategy Development- Synthesis Process • A workshop was held April 25-28 including invited international, science, governmental, commercial, and academic participants. They worked with NASA to begin developing the objectives for lunar exploration • From this and other upcoming forums, a Strategy Synthesis Team will produce an integrated global lunar exploration strategy that describes: • Themes - Major focal areas of lunar exploration • Objectives - Specific achievable task areas that support the defined themes • Strategy - Time phased strategy for accomplishing defined objectives with key milestones and decision points identified • A Lunar Architecture Team will develop a combined lunar robotic and human architecture. It will: • Interim products will be developed at regular intervals to provide draft versions of the strategy for review by the stakeholder community. • Participating agencies can use these opportunities to internally review the draft strategy within their agency • The final products will be include products for public consumption as internal programmatic use • Include a range of surface reference missions that address Exploration strategy and objectives • Lead to requirements for lunar infrastructure • Include decision points/onramps for international, science and commercial participation 8
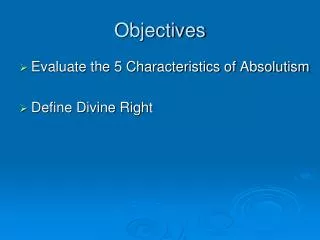
Architecture Development Flow FY 2 0 0 5 FY 2 0 0 6 FY 2 0 0 7 1 Q 0 5 2 Q 0 5 3 Q 0 5 4 Q 0 5 1 Q 0 6 2 Q 0 6 3 Q 0 6 4 Q 0 6 1 Q 0 7 2 Q 0 7 3 Q 0 7 4 Q 0 7 1 Q 0 8 E S A S LRAS A g e n c y Develop Robotic Arch Trade ESMD Human & Robotic Arch E S M D E x p l o r a t i o n E S M D R L E P - 2 T r a d e s R L E P R L E P R e q u i r e m e n t s T r a d e S t u d i e s L P R P A r c h i t e c t u r e D e v e l o p m e n t D e v e l o p S m a r t B u y e r D e s i g n s A c q . f o r 1 s t l a n d e r Key: Exploration Systems Architecture Study (ESAS) Lunar Robotics Architecture Study (LRAS) 9
Value Shots Architecture BY 2008 BY 2010 BY 2012 BY 2014 BY 2016 Launch 5: Resource Landing & Secondary PL • Launch 1:LRO & • LCROSS • LRO: • Topographical map • Orbital site imaging of land form scale & landing scale • Identification of H20 & other volatiles sources • Radiation albedo at polar regions • Thermal environment • Regolith characterization • Gravitational map • LCROSS: • Impactor & Spacecraft • Near IR Spectrometer • Visible & IR Cameras • Launch 2: • Safe Landing & Secondary PL • Lander: • Precision Nav & Hazard Avoidance:with pre-RLEP maps/data • Standard Measurement Package: Cameras, Environmental (therm/rad), System Engineering data, including mechanical performance degradation • Dust Experiments: Surface reactivity & passivation; Physical, Electrostatic, Magnetic, Chemical, & Combustion properties; Sealing pressure vehicles; Filtration effectiveness • LSAM Flight Qual: Processor boards, Landing sensors, Valves & actuators • Resource Characterization:Filter- wheel camera, Remote spectrograph, LIBS • Launch 3: • Challenge Landing & Secondary PL • Lander: • Precision Nav & Hazard Avoidance:using LRO data (e.g. poles) • Standard Measurement Package • Dust Experiments:Same as Lander 1- as backup if Lander 1 fails, to new location if Lander 1 succeeds- small changes to measurements • Resource Characterization:Same as Lander 1 • Launch 4: • Crowded Landing & Secondary PL • Lander: • Precision Nav & Hazard Avoidance:near another object (e.g. previous lander) • Standard Measurement Package • Dust Mitigation Techniques:Repel, clean, filter • Radiation Shielding Techniques:regolith • Biological Effects: Cell Experiments • Resource Characterization:Sample & analyze regolith (may require mobility) • Lander: • Precision Nav & Hazard Avoidance:Resource location driven • Standard Measurement Package • Resource Characterization for ISRU:Sample & cook • Mobility Demonstration • Prototype ISRU Production • Secondary Payload: TBD Secondary Payload: TBD Secondary Payload: TBD Secondary Payload: Comm Sat
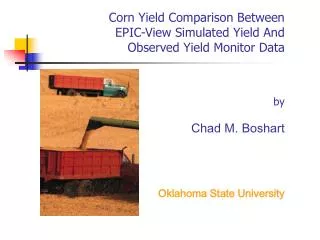
Test 2006 2008 2010 2012 2014 2016 2018 CaLV PDR Core ATP Value Shots Architecture Launch 1: LRO & LCROSS Launch 2: Safe Landing Launch 3: Challenge Landing Launch 4: Crowded Landing Launch 5: Resource Landing 7th Human Landing Lunar Landing Test LSAM PDR CDR ATP 2016 - EELV 400 2016 – Resource Landing 350 2014 - EELV 2014 - Secondary Payload 300 2014 – Crowded Landing 250 2012 - EELV Cost, FY06$M 200 2012 - Secondary Payload 2012 – Challenge Landing 150 2010 - Delta II 100 2010 - Comm Relay 2010 – Safe Landing 50 2008 - EELV 0 2008 - LCROSS 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 2008 - LRO Year Target Budget Covers all identified major needs for Constellation
Micro Lunar Express Lander Series • GOALS: • Achieve a robust robotic precursor program • Help sustain the Vision • Enable training of our systems engineers • Reduce costs to program • Answer critical questions for Constellation OBJECTIVE: Initiate a series of small Lunar lander missions beginning by 2008 with a budget of $100M per mission including launch vehicle. APPROACH: Short Schedule, Incremental Development, Aggressive Testing Leverage Existing Designs to Minimize Risk
uLander Mission Approach - $100M total cost • Current capabilities support two nearly identical designs: • 130 Kg Lander (four tanks) on a Minotaur V • 50 Kg science payload to surface, 200 Watts • 65 Kg Lander (two tanks) on a Falcon 1 • 10 Kg science payload to surface, 133 Watts • Design built by national KKV, Small/Micro/NanoSat Experts • Heavily leverages DoD investments: the components are real, they do the job, and we know how much they cost and weigh • First Lander: equatorial mission with 10 kg payload • Payloads of 1-5 kg with high priority goals • Other payloads based on already identified requirements and NASA Objectives • Second Lander co-developed to maximize capability • 50 kg of payload with several instruments up to 25 Kg
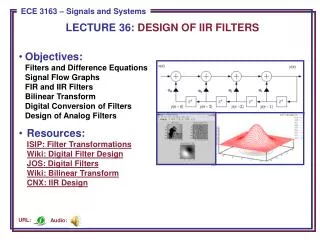
INITIAL COST ESTIMATES BASED ON >100 DOD, NASA PROJECTS SAMPEX FAST SWAS TRACE WIRE LP XSS-11 MSTI-1 MSTI-2 MSTI-3 LEAP EKV ACAT
Lunar Robotic Forward Plan • Recent Lunar Robotic Architecture Studies show a range of possibilities: • RLEP architecture studies met known requirements within a $250M - $400M per mission budget • RLEP 2 studies provided a range of possible lander designs from $400M to $1.6B – addressing a range of measurement objectives • uLander Express concept studies showed that heavy leveraging from DoD investments could result in capability-driven lander designs for $100M per mission • LRAS results demonstrated viable architectures meeting known requirements, with missions ranging from $300M to $1.7B per mission • Use ESAS, LRAS, and the Exploration Strategy Workshop and follow-on studies to create optimal integrated human and robotic architecture 6