Download
1 / 28
280 likes | 418 Views
DAQ Controls CMS: XDAQ BTeV: RTES, GME, ARMORs EPICS. H.G.Essel, J.Adamczewski, B.Kolb, M.Stockmeier. CMS: blueprint for clustered DAQ. CMS DAQ: requirements. Communication and Interoperability

E N D
DAQ Controls CMS: XDAQ BTeV: RTES, GME, ARMORs EPICS H.G.Essel, J.Adamczewski, B.Kolb, M.Stockmeier Hans G. Essel DAQ Control
CMS: blueprint for clustered DAQ Hans G. Essel DAQ Control
CMS DAQ: requirements • Communication and Interoperability • Transmission and reception within and across subsystem boundaries without regard of the used protocols • Addition ofprotocolswithout a need for modifications in the applications • Device Access • Access to custom devices for configuration and readout • Access to local and remote devices (bus adapters) without the need for modifications in applications • Configuration, control and monitoring • Make parameters of built-in or user defined types visible and allow their modification • Allow the coordination of application components (define their states and modes) • Allow the inspection of states and modes • Provide services for recording structured information • Logging, error reporting • Interface to persistent data stores (preferrably without the need to adapt the applications) • Publish all information to interested subscribers • Device allocation, sharing and concurrent access support • Maintainability and Portability • Allow portability across operating system and hardware platforms • Support access for data across multiple bus systems • Allow addition of new electronics without changes in user software • Provide memory management functionality to • Improve robustness • Give room for efficiency improvements • Application code shall be invariant with respect to the physical location and the network • Possibility to factorise out re-usable building blocks • Scalability • Overhead introduced by the software environment must be constant for each transmission operation and small with respect to the underlying communication hardware in order not to introduce unpredictable behaviour • Allow applications to take advantage of additional resource availability • Flexibility • Allow the applications to use multiple communication channels concurrently • Addition of components must not decrease the system’s capacity Hans G. Essel DAQ Control
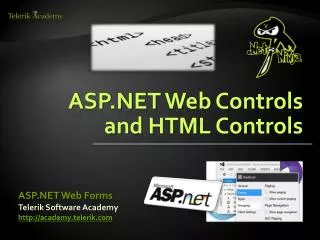
CMS XDAQ • XDAQ is a framework targeted at data processing clusters • Can be used for general purpose applications • Has its origins in the I2O (Intelligent IO) specification • The programming environment is designed as an executive • A program that runs on every host • User applications are C++ programmed plug-ins • Plug-ins are dynamically downloaded into the executives • The executive provides functionality for • Memory management • Systems programming queues, tasks, semaphores, timers • Communication Asynchronous peer-to-peer communication model Incoming events (data, signals, …) are demultiplexed to callback functions of application components • Services for configuration, control and monitoring • Direct hardware access and manipulation services • Persistency services Hans G. Essel DAQ Control
XDAQ Availability http://cern.ch/xdaq Current version: 1.1 Next releases: V 1.2 in October 2002 (Daqlets) V 1.3 in February 2003 (HAL inspector) Change control: Via sourceforge: http://sourceforge.net/projects/xdaq Version control: CVS at CERN License: BSD style Hans G. Essel DAQ Control
XDAQ: References • J. Gutleber, L. Orsini, « Software Architecture for Processing Clusters based on I2O », Cluster Computing, the Journal of Networks, Software and Applications, Baltzer Science Publishers, 5(1):55-64, 2002(goto http://cern.ch/gutleber for a draft version or contact me) • The CMS collaboration, “CMS, The Trigger/DAQ Project”, Chapter 9 - “Online software infrastructure”, CMS TDR-6.2, in print (contact me for a draft), also available at http://cmsdoc.cern.ch/cms/TDR/DAQ/ • G. Antchev et al., “The CMS Event Builder Demonstrator and Results with Myrinet”, Computer Physics Communications 2189, Elsevier Science North-Holland, 2001 (contact Frans.Meijers@cern.ch) • E. Barsotti, A. Booch, M. Bowden, “Effects of various event building techniques on data acquisition architectures”, Fermilab note, FERMILAB-CONF-90/61, USA, 1990. Hans G. Essel DAQ Control
XDAQ event driven communication • Dynamically loaded application modules (from URL, from file) • Inbound/Outbound queue (pass frame pointers, zero-copy) • Homogeneous frame format Readout component Generates a DMA completion event Computer Executive framework Demultiplexes incoming events to listener application component foo( ) Application component Implements callback function Peer transport Receives messages from network Hans G. Essel DAQ Control
Application component device Processing nodeIOP Controller node host Homogeneous communication frameSend for local, remote, host single addressing scheme (Tid) Application framework XDAQ: I2O peer operation for clusters Messaging Layer Messaging Layer ‚ ‡ ˆ Peer Transport Agent Peer Transport Agent † I2O Message Frames Executive Executive ƒ „ … Application ‰ Application Peer Transport Hans G. Essel DAQ Control
XDAQWin client Configuration tree XML based configuration of a XDAQ cluster Daqlet window Daqlets are Java applets that can be used to customize the configuration, control and monitoring of all components in the configuration tree Hans G. Essel DAQ Control
XDAQ: component properties Component Properties Allows the inspection andmodification of components’exported parameters. Hans G. Essel DAQ Control
BTeV: a 20 THz real-time system • Input: 800 GB/s (2.5 MHz) • Level 1 • Lvl1 processing: 190s rate of 396 ns • 528 “8 GHz” G5 CPUs (factor of 50 event reduction) • high performance interconnects • Level 2/3: • Lvl 2 processing: 5 ms (factor of 10 event reduction) • Lvl 3 processing: 135 ms (factor of 2 event reduction) • 1536 “12 GHz” CPUs commodity networking • Output: 200 MB/s (4 kHz) = 1-2 Petabytes/year Hans G. Essel DAQ Control
BTeV: The problem • Monitoring, Fault Tolerance and Fault Mitigation are crucial • In a cluster of this size, processes and daemons are constantly hanging/failing without warning or notice • Software reliability depends on • Physics detector-machine performance • Program testing procedures, implementation, and design quality • Behavior of the electronics (front-end and within the trigger) • Hardware failures will occur! • one to a few per week • Given the very complex nature of this system where thousands of events are simultaneously and asynchronously cooking, issues of data integrity, robustness, and monitoring are critically important and have the capacity to cripple a design if not dealt with at the outset… BTeV [needs to] supply the necessary level of “self-awareness” in the trigger system. Real Time Embedded System Hans G. Essel DAQ Control
BTeV: RTES goals • High availability • Fault handling infrastructure capable of Accurately identifying problems (where, what, and why) Compensating for problems (shift the load, changing thresholds) Automated recovery procedures (restart / reconfiguration) Accurate accounting Extensibility (capturing new detection/recovery procedures) Policy driven monitoring and control • Dynamic reconfiguration • adjust to potentially changing resources • Faults must be detected/corrected ASAP • semi-autonomously with as little human intervention as possible • distributed & hierarchical monitoring and control • Life-cycle maintainability and evolvability • to deal with new algorithms, new hardware and new versions of the OS Hans G. Essel DAQ Control
RTES deliverables A hierarchical fault management system and toolkit: • Model Integrated Computing • GME (Generic Modeling Environment) system modeling tools • and application specific “graphic languages” for modeling system configuration, messaging, fault behaviors, user interface, etc. • ARMORs (Adaptive, Reconfigurable, and Mobile Objects for Reliability) • Robust framework for detection and reaction to faults in processes • VLAs (Very Lightweight Agents for limited resource environments) • To monitor/mitigate at every level • DSP, Supervisory nodes, Linux farm, etc. Hans G. Essel DAQ Control
RTES Development • The Real Time Embedded System Group • A collaboration of five institutions, • University of Illinois • University of Pittsburgh • University of Syracuse • Vanderbilt University (PI) • Fermilab • NSF ITR grant ACI-0121658 • Physicists and Computer Scientists/Electrical Engineers at BTeV institutions Hans G. Essel DAQ Control
Global Operations Manager Logical Control Network Logical Data Net Logical Data Net Global Fault Manager Region Fault Mgr RTES structure Modeling Analysis Resource Reconfigure Performance Diagnosability Reliability Synthesis Design and Analysis Fault Behavior Feedback Algorithms Synthesis Runtime Region Operations Mgr ExperimentControl Interface L2,3/CISC/RISC L1/DSP Soft Real Time Hard Hans G. Essel DAQ Control
GME: data type modeling • Modeling of Data Types and Structures • Configure marshalling-demarshalling interfaces for communication Hans G. Essel DAQ Control
RTES: GME modeling environment • Fault handling • Process dataflow • Hardware Configuration Hans G. Essel DAQ Control
RTES: GME fault mitigation modeling language (1) C • Configuration of ARMOR Infrastructure (A) • Modeling of Fault Mitigation Strategies (B) • Specification of Communication Flow (C) B A Hans G. Essel DAQ Control
FMML Model – Behavior Aspect Translator ARMOR ARMOR Microkernel Switch(cur_state) case NOMINAL: I f (time<100) { next_state = FAULT; } Break; case FAULT if () { next_state = NOMINAL; } break; Fault Tolerant Custom Element Communication Custom Element class armorcallback0:public Callback { public:ack0(ControlsCection *cc, void *p) : CallbackFaultInjectTererbose>(cc, p) { } void invoke(FaultInjecerbose* msg) { printf("Callback. Recievede dtml_rcver_LocalArmor_ct *Lo; mc_message_ct *pmc = new m_ct; mc_bundle_ct *bundlepmc->ple(); pmc->assign_name(); bundle=pmc->push_bundle();mc); } }; RTES: GME fault mitigation modeling language (2) • Model translator generates fault-tolerant strategies and communication flow strategy from FMML models • Strategies are plugged into ARMOR infrastructure as ARMOR elements • ARMOR infrastructure uses these custom elements to provide customized fault-tolerant protection to the application Hans G. Essel DAQ Control
ARMOR • Adaptive Reconfigurable Mobile Objects of Reliability: • Multithreaded processes composed of replaceable building blocks • Provide error detection and recovery services to user applications • Hierarchy of ARMOR processes form runtime environment: • System management, error detection, and error recovery services distributed across ARMOR processes. • ARMOR Runtime environment is itself self checking. • 3-tiered ARMOR support of user application • Completely transparent and external support • Enhancement of standard libraries • Instrumentation with ARMOR API • ARMOR processes designed to be reconfigurable: • Internal architecture structured around event-driven modules called elements. • Elements provide functionality of the runtime environment, error-detection capabilities, and recovery policies. • Deployed ARMOR processes contain only elements necessary for required error detection and recovery services. • ARMOR processes resilient to errors by leveraging multiple detection and recovery mechanisms: • Internal self-checking mechanisms to prevent failures from occurring and to limit error propagation. • State protected through checkpointing. • Detection and recovery of errors. • ARMOR runtime environment fault-tolerant and scalable: • 1-node, 2-node, and N-node configurations. Hans G. Essel DAQ Control
ExecARMOR AppProcess Execution ARMOR Oversees application process(e.g. the various Trigger Supervisor/Monitors) Daemons Detect ARMOR crash and hang failures Daemon network Heartbeat ARMOR Detects and recovers FTM failures Fault Tolerant Manager Highest ranking manager in the system Daemon Daemon ARMOR processes Provide a hierarchy of error detection and recovery.ARMORS are protected through checkpointingand internal self-checking. Fault TolerantManager (FTM) HeartbeatARMOR ARMOR system: basic configuration Hans G. Essel DAQ Control
EPICS overview EPICS is a set of software components and tools to develop control systems. The basic components are: OPI (clients) • Operator Interface. This is a UNIX or Windows based workstation which can run various EPICS tools (MEDM, ALH, OracleArchiver). IOC (server) • Input Output Controller. This can be VME/VXI based chassis containing a Motorola 68xxx processor, various I/O modules, and VME modules that provide access to other I/O buses such as GPIB, CANbus. LAN (communication) • Local area network. This is the communication network which allows the IOCs and OPIs to communicate. EPICS provides a software component, Channel Access, which provides network transparent communication between a Channel Access client and an arbitrary number of Channel Access servers. Hans G. Essel DAQ Control
Hierarchy in a flat system IOC tasks • IOCs • One IOC per standard CPU (Linux, Lynx, VxWorks) • clients • on Linux, (Windows) • Agents • Segment IOCs beeing also clients Name space architecture! IOC IOC tasks Client IOC tasks IOC tasks IOC Hans G. Essel DAQ Control
Task command threadworking threadmessage thread Local communication (node) Node • Commands handled by threads • Execution maybe in working thread • Message thread maybe not needed commands intertask Task statussegment IOC memory Task messages Hans G. Essel DAQ Control
MBS node and monitor IOC commands (text) Task IOC asynchronous External control statussegment Dispatcher on request Statusserver Task Messageserver asynchronous messages (text) Hans G. Essel DAQ Control
Screen shot FOPI Hans G. Essel DAQ Control
Kind of conclusion • RTES: Very big and powerful. Not simply available! • Big collaboration • Fully modelled and simulated using GME • ARMORs for maximum fault tolerance and control • XDAQ: Much smaller. Installed at GSI. • Dynamic configurations (XML) • Fault tolerance? • EPICS: From accelerator controls community. Installed at GSI • Maybe best known • No fault tolerance • Not very dynamic Hans G. Essel DAQ Control