Download

1 / 15
150 likes | 445 Views
Perfect Matching for Biconnected Cubic Graphs in O ( n log 2 n ) Time. Krzysztof Diks & Piotr Stańczyk. Cubic graph without perfect matching contains at least three bridges Conclusion: every biconnected cubic graph has a perfect matching. Petersen theorem (1891).

E N D
Perfect Matching for Biconnected Cubic Graphs in O(nlog2n) Time Krzysztof Diks &Piotr Stańczyk
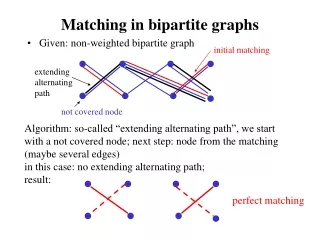
Cubic graph without perfect matching contains at least three bridges Conclusion: every biconnected cubic graph has a perfect matching Petersen theorem (1891)
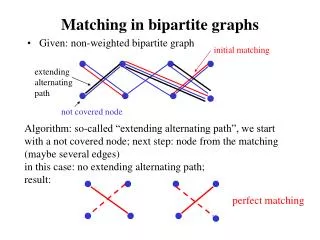
Observation: at least one of two local reductions of n+2-vertex biconnected graph leads to n-vertex biconnected graph Idea: keep reducing a graph (preserving biconnectivity) until it consists of 2 vertices. Frink’s algorithm - O(n2) time (1926)
Frink’s algorithm - O(n2) time (1926) • Reduce graph to 2-vertex (preserving biconnectivity) – O(n) phases, O(n) time each • Construct arbitrary matching – O(1) • Reverse all reductions (4 cases possible) – O(n) phases, O(n) time each (worst case)
Biedl’s et al. algorithm – O(nlog4n) time (SODA,1999) • Valid reduction selection • Instead of computing biconnected components from scratch use dynamic graph biconnectivity algorithm – O(log4n) per edge removal/addition/query • Elimination of case (d) from the revertion process • 1) Select an edge e which is excluded from the matching • 2) Perform reductions against edges incident to e (edge e „travels” along the graph) • 3) Construct initial matching excluding edge e • 4) Reverse all reductions – case d) does not occur, as e is never matched • Complexity: O(nlog4n)
New algorithm – O(nlog2n) time • Replace dynamic graph biconnectivity algorithm with: • Dynamic graph connectivity algorithm – O(log2n) deterministic / O(lognloglog3n) randomized time • Tarjan’s dynamic trees – O(logn) (addition, removal of edges, change of tree’s root, LCA computation) • How to perform reduction phase with a new approach?
New algorithm – O(nlog2n) time • Remove reduction edge along with all incident vertices / edges. Two cases are possible: • Resulting graph is not connected • If so, graph has a structure presented in figure (a) • One reduction leads to not connected graph (can be verified with dynamic connectivity algorithm) • The other reduction leads to biconnected graph (Frink’s theorem)
New algorithm – O(nlog2n) time • Resulting graph is connected • Analyze changes in spanning tree maintained by dynamic connectivity data-structure, update Tarjan’s dynamic trees • Analyze edges of a spanning tree T spanned by vertices A, B, E and F. Select reduction which covers all spanned edges with cycles (use LCA operation from Tarjan’s trees) • Selected reduction maintains biconnectivity…
New algorithm – O(nlog2n) time • Selected reduction maintains biconnectivity: • Added edges and edges spanned by A, B, C and D are covered by a cycle • Any other edge e→ before reduction there was a cycle c covering e. • If c is a cycle in reduced graph → OK • Otherwise, c contains some removed edges E. Let f be a cycle in T+E containing all edges of E. Symmetric difference of f and c is a cycle in reduced graph • Each edge belongs to some cycle → graph is biconnected • Overall complexity: O(nlog2n) deterministic, O(nlognloglog3n) randomized
Possible improvement • Replacement of dynamic connectivity algorithm with decremental counterpart – how to handle edge insertion? • New vertex and edge representation: Not allowed Allowed
Possible improvement • It is not allowed to perform reductions against not allowed edges – how to bypass it… • Introduce support for reverse points in decremental connectivity data-structure • In case of performing reduction against not allowed edge, it is required to execute reverse point first, three cases are possible…
Possible improvement • Even cycle case:
Possible improvement • Odd cycle case: not allowed – introduces bridge
Possible improvement • No cycle case:
Thank you • Any questions?