Download
1 / 29
330 likes | 684 Views
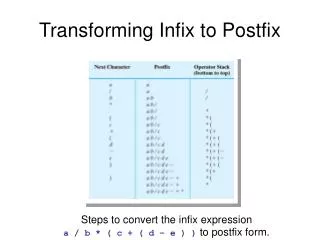
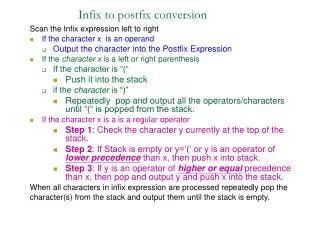
Transforming Infix to Postfix. Steps to convert the infix expression a / b * ( c + ( d – e ) ) to postfix form. Infix-to-Postfix Algorithm. Checking for Balanced () , [] , {}. The contents of a stack during the scan of an expression that contains the balanced delimiters {[()]}

E N D
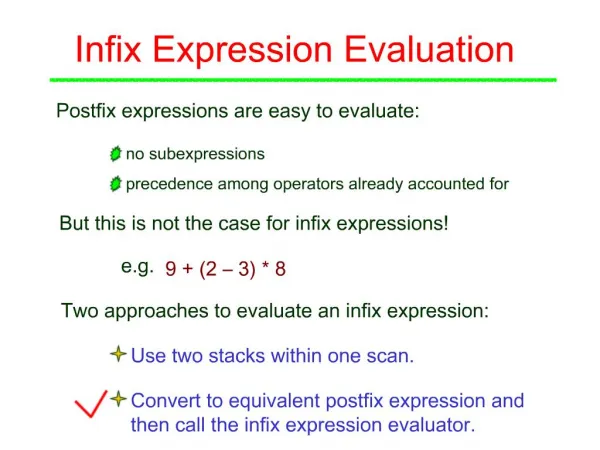
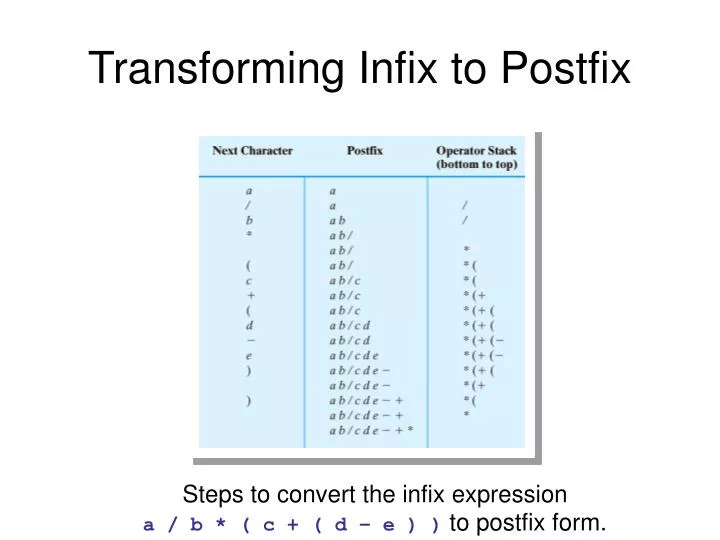
Transforming Infix to Postfix Steps to convert the infix expression a / b * ( c + ( d – e ) ) to postfix form.
Checking for Balanced (), [], {} The contents of a stack during the scan of an expression that contains the balanced delimiters {[()]} a{b[c(d+e)/2 – f] +1}
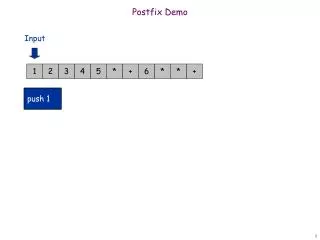
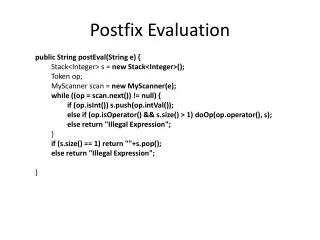
Evaluating Postfix Expression The stack during the evaluation of the postfix expression a b + c / when a is 2, b is 4 and c is 3
The Program Stack The program stack at 3 points in time; (a) when main begins execution; (b) when methodA begins execution, (c) when methodB begins execution.
Circular Linked Implementations of a Queue A circular linked chain with an external reference to its last node that (a) has more than one node; (b) has one node; (c) is empty.
Array-Based Implementation of a Queue An array that represents a queue without shifting its entries: (c) after several more additions & removals; (d) after two additions that wrap around to the beginning of the array
Binary Trees • If a binary tree of height h has all leaves on the same level h and every nonleaf in a full binary tree has exactly two children • A complete binary tree is full to its next-to-last level • Leaves on last level filled from left to right
Total number of nodes n for a full tree can be calculated as: The height of a binary tree with n nodes that is either complete or full is log2(n + 1) Binary Trees
Traversals Exercise • The order of these nodes being visited using 4 different traversal methods
Answer • In this binary tree, D = node, L = left, R = right • Preorder (DLR) traversal yields: A, H, G, I, F, E, B, C, D • Postorder (LRD) traversal yields: G, F, E, I, H, D, C, B, A • In-order (LDR) traversal yields: G, H, F, I, E, A, B, D, C • Level-order traversal yields: A, H, B, G, I, C, F, E, D
Binary Search Trees Two binary search trees containing the same names as the tree in previous slide
Removing an Entry, Node Has Two Children Node N and its subtrees; (a) entry a is immediately before e,b is immediately after e; (b) after deleting the node that contained a and replacing e with a.
Removing an Entry, Node Has Two Children Node N and its subtrees; (a) entry a is immediately before e,b is immediately after e; (b) after deleting the node that contained a and replacing e with a.
Removing an Entry, Node Has Two Children (a) A binary search tree; (b) after removing Chad;
Heaps • A complete binary tree • Nodes contain Comparable objects • Each node contains no smaller (or no larger) than objects in its descendants • Maxheap • Object in a node is ≥ its descendant objects. Root node contains the largest data • Minheap • Object in a node is ≤ descendant objects • Root node contains the smallest data
Using an Array to Represent a Heap • When a binary tree is complete • Can use level-order traversal to store data in consecutive locations of an array • Enables easy location of the data in a node's parent or children • Parent of a node at i is found at i/2(unless i is 1) • Children of node at i found at indices 2i and 2i + 1
Using an Array to Represent a Heap Fig 1. (a) A complete binary tree with its nodes numbered in level order; (b) its representation as an array.
Adding an Entry In Figure 1, the steps in adding 85 to the maxheap Begin at next available position for a leaf Follow path from this leaf toward root until find correct position for new entry
Removing the Root • To remove a heap's root • Replace the root with heap's last child • This forms a semiheap • Then use the method reheap • Transforms the semiheap to a heap
Creating a Heap The steps in adding 20, 40, 30, 10, 90, and 70 to a heap.
Creating a Heap More efficient to use reheap than to use add The steps in creating a heap by using reheap.
Breadth-First Traversal (ctd.) A trace of a breadth-first traversal for a directed graph, beginning at vertex A.
Depth-First Traversal A trace of a depth-first traversal beginning at vertex A of the directed graph
Shortest Path in an Weighted Graph Finding the cheapest path from vertex A to vertex H in the weighted graph
The Adjacency Matrix (a) A directed graph and (b) its adjacency matrix.
The Adjacency Matrix • Adjacency matrix uses fixed amount of space • Depends on number of vertices • Does not depend on number of edges • Typically the matrix will be sparse • Presence of an edge between two vertices can be known immediately • All neighbors of a vertex found by scanning entire row for that vertex
The Adjacency List Adjacency lists for the directed graph
The Adjacency List • Represents only edges that originate from the vertex • Space not reserved for edges that do not exist • Uses less memory than corresponding adjacency matrix • Thus more often used than adjacency matrix