Download
1 / 74
740 likes | 798 Views
Learn about forces in rigid bodies, types of forces, principles, equivalent systems of forces, internal and external forces, contact forces, translations, rotations, and geometric interpretations of vector products.

E N D
What is Force? • A force is that effect which tends to change the state of rest or uniform motion of a body. • Line of Action of a force is that straight line that is collinear with the force vector. • Rigid BodyA body that does not deform when subjected to external loads.
System of Force • set of two or more forces. • Collinear: a system of forces all having the same line of action • Coplanar/two-dimensional: a system of forces all lying in the same plane, otherwise it is three-dimensional or is said to be a line in space. • Concurrent: a system of forces all passing through the same point; a system of forces acting on a point
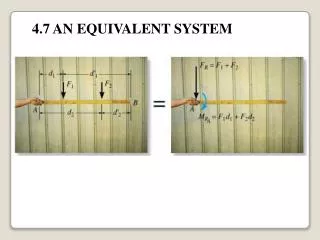
Equivalent Systems of Forces • Two forces are said to be equivalent if they have the same effect on the rigid body, i,e. the forces must be equal and have the moment about about any point. • according to the principle of transmissibility, all sliding forces are equivalent forces even though their point of application can be transmitted along their line of action Note: the principle of transmissibility deals with the external behaviour of rigid bodies under the action of external loads and may not give rise to equivalent system of internal forces in the rigid body
P1 P2 P2 P1 Consider a rigid bar subjected to forces P1 and P2 as shown below • Note that from the principle of transmissibility, the rigid body movement of the bar will be the same in the two cases. • However, the internal forces in the first case will be tensile while in the second case, will be compressive. If the bar is not absolutely rigid, it will stretch slightly in the first case while it will shorten slightly in the second case.
Forces on Rigid Bodies Internal Forces • internal and represent the resistance of the various particles to the external forces acting on the rigid body. • Transmit the externally applied forces to the support reactions • give rise to stresses and strains and hence responsible for the deformation of bodies. External Forces • These forces are external to the rigid body and represent the action of other bodies on the rigid body • Responsible for the external behaviour of the rigid body, i.e. rigid body motion or the prevention of motion • These are the forces that are considered when equilibrium of a body is analysed
Note that an Internal Force may become an external force when a section or part of a structure is being considered Two Types of External Forces: • Applied Forces: • Responsible for rigid body motion • Support reactions: • Responsible for rigid body remaining at rest.
Types of Rigid Body Motion • Translation: • Movement along a straight line • Combination of Translation & Rotation • Rotation: • Movement about an axis
Alternative Classification of Forces: Body & Surface Forces • Body force: one that acts on the volume of an object such as gravitational force and other distant forces like electromagnetism. • Surface force: one that acts on the surface of a body. e.g. most contact forces.
Contact Forces • result from contact between objects. Most forces arise as a result of contact between bodies • Surfaces in Contact: Typically Normal force and Friction force which exist along the surface of contact.
Contact Forces contd... • Ropes and Cables: Ropes and cables will only take tension. If passed over a frictionless pulley, tension in the rope on either side of the pulley will be the same. • Springs: Can be subjected to tension or compression. Force in spring F is proportional to the change in length of spring , • i.e. F ==> F = k
Vector/Cross Product of Two Vectors • The vector/cross product of two vectors P and Q is defined as the vector V whose magnitude is equal to the product of the magnitudes of P and Q and the sine of the least angle q between them. • The direction of V is perpendicular to the plane containing P and Q and the sense is defined by the right hand rule. • Mathematically, • PxQ = V = |P| |Q|sinq l where l is a unit vector perpendicular to the plane containing P and Q and indicates the direction of V.
Q Q2 Q3 V q d P Geometric Interpretation of Vector/Cross Product • Geometrically, the magnitude of the vector/cross product of two vectors measures the area of a parallelogram which has the two vectors for sides.Observe that d = |Q|sinq • Note also that using the geometrical interpretation, we see thatPxQ = PxQ2 = PxQ3 = V. Hence, the vector product will remain unchanged if we replace Q by any vector Q2 or Q3 which is coplanar with P and Q and such that the line joining the tips of Q and Q2 or Q and Q3 are parallel to P. Note that: • d = |Q|sinq = |Q2|sinq = |Q3|sinq
Vector/Cross Product of Two Vectors Expressed in Terms of their Rectangular Components • If P =Px i + Py j + Pz k and Q =Qx i + Qy j + Qz k, then PxQ is best evaluated by determining the 3 by 3 determinant format formes by the orthogonal unit vectors and the rectangular scalar components of P and Q, i.e.
Rules of Vector/Cross Product • PxQ QxP (Vector product is NOT Commutative) • PxQ = - QxP (Anti-Commutative) • Px(Q +R) = PxQ + PxR (Distributive Law: Basis of Varignon’s Theorem) • a(PxQ) = aPxQ = Pxa Q (Associative Law for Multiplication with Scalar a) • PxQ = 0 if P = 0 or Q = 0 or P=a Q, i.e.P and Q are parallel • PxP = QxQ = 0 • i x i = j x j = k x k = 0 • i x j = k; j x k = i; k x i = j; • j x i = - i x j = -k; k x j = - j x k = -i; i x k = - k x i = -j; • Px(Q xR) PxQ xR (Triple Vector product is NOT Associative) • i x (j x j) = (i x j) x j
Applications of Vector/Cross Product • Computing the moment of a force about a point • Determining the perpendicular distance from a point to a line or plane • Calculating the shortest distance between two non-parallel, non-intersecting lines • Relating angular and linear motion
Moment of a Force about a point • The magnitude of the moment of a force about a point is the product of the force and the perpendicular distance from the point to the line of action of the force, i.e. |Mo| = |F|.d • The direction of the moment vector is determined using the right hand rule. • Alternatively, the moment of a force F about a point O can be defined as the vector/cross product of a position vector r and F, where r acts from point O to any point on the line of action of F, i.e. Mo = r x F • Recall that |Mo| = |r| . |F| sinq, where q is the least angle between r and F
Moment of a Force about a Point Contd... • The magnitude of the moment of a force about a point is a measure of the tendency of F to cause the rigid body to rotate about an axis directed along the moment vector • For 2-D problems the direction of the moment of a force can be specified by indicating the sense of the moment, i.e. the direction of rotation of the rigid body • Note that in all cases, the direction of the moment vector is determined from the right hand rule and is always perpendicular to the plane containing the position vector r and the force F
Varignon's Theorem • States that about any point, the algebraic sum of the moments of the components of a force is equal to the moment of that force about that point • Recall that the resultant of any force is the vector sum of its rectangular components • the moment of a force about any point is equal to the cross product between a position vector r (directed from the point to any point on the line of action of the force) and the force F
Moment of a Force about a Point in terms of Vector Algebra • The moment of a force, defined in terms of vector algebra, is the vector/cross product between a position vector r (directed from the point to any point on the line of action of the force) and the force, i.e. Mo = r x F • The direction of Mo is perpendicular to the plane containing r and F and the sense is defined by the right hand rule such that r, F and Mo form a right-handed triad • Note that the vector r is directed from the point about which the moment is required to any point on the line of action of F. Mo = r x F
Example 1 • Determine the moment about the origin of the force F = 10i + 2j 2k acting at point (4,5,6). What are the direction angles of the resulting moment vector.
Example 2 • A force F with magnitude 70.7 KN passes through the point from (4,0,0) to (0,5,3). Find the moment of this force (a) with respect to the origin and (b) with respect to the point B(-2,-3,2)
Example 3 For the bracket shown below, calculate • the moment of |F about the origin • the moment of |F about point A
Sample Problem 3.4 • Given: Rectangular plate supported by brackets at A & B and a wire CD. Tension in CD = 200N • Required: Moment about A exerted by the wire on Point C. • Approach: We know the coordinates of the two points along which F acts; hence line of action of F as well as its magnitude are known. Hence, we can express F in terms of rectangular components
Problem • Show that the moment of a force about a point is equal to the cross product of the directed line segment (from the point to any point on the line of action of the force) and the force, i.e. r x F = r' x F • r, r' are directed line segments from the same point to different points on the line of action of F.
Perpendicular Distance, d, from a Point to a Line or Plane • This is the magnitude of the cross product of a position vector r from the point to any point on the line or plane and a unit vector l, which acts along the line or lies in the plane, i.e. • d = | r x l| • The same expression is used for calculating the shortest distance between two non-parallel, non-intersecting lines. In this case, r is directed from any point on one of the lines to any point on the second line and l is a unit vector along the second line.
Scalar/Dot Product of Two Vectors • The scalar/dot product of two vectors P and Q is a scalar quantity whose magnitude is equal to the product of the magnitudes of P and Q and the cosine of the least angle q between their directions. Mathematically, • P.Q = |P| |Q| cosq. • Uses of Scalar/Dot Product • Determining the angle between two vectors • Finding the component or projection of a vector in a given direction • To compute the work done by a force moving through a displacement
Properties of Scalar/Dot Product • P.Q = Q.P (Commutative Law) • P.(Q +R) = P.Q + P.R (Distributive Law) • a(P.Q) = aP.Q = P.a Q = P.Q a(Associative Law for Multiplication with Scalar a) • P.Q = 0 if P = 0 or Q = 0 or P is perpendicular toQ • Dot product of like orthogonal unit vectors is unity, i.e. • i . i = j . j = k . k = 1 • Dot product of unlike orthogonal unit vectors is zero, i.e. • i . j = j . k = k . i = 0 • P.(Q .R) is meaningless(You cannot take the dot product of a scalar and a vector)
Scalar/Dot Product of two vectors expressed in terms of their rectangular components • If P =Px i + Py j + Pz k and Q =Qx i + Qy j + Qz k then P.Q is the sum of the products of the respective scalar components, i.e. • P.Q = Px Qx + Py Qy + Pz Qz
To find the angle q between two vectors P and Q • P.Q = P Q Cos q =Px Qx + Py Qy + Pz Qz Hence To find the scalar component of a vector P along a given direction • Take the dot productof P and a unit vector l acting along the given direction, i.e., P.l = P Cos q =Px lx + Py ly + Pz lz
Example • Given two perpendicular vectors U = Uxi - 4j V = -2i + 6j Required: Value ofUx
Example • Given two forces F1 and F2 of magnitudes 20 N and 30 N, respectively. F1 passes through points (0,-5,8) and (3,15,6) while F2 passes through points (0,0,0) and (6,8,10). Determine the magnitude and direction of a single force which is equivalent to both F1 and F2
Mixed Triple (Scalar) Product • The Mixed Triple (Scalar) Product of three vectors S, P and Q is a scalar quantity whose magnitude is given by the the determinant of the matrix whose elements are the rectangular components of the three vectors, i.e.
Geometrical Interpretation of Mixed Triple (Scalar) Product • The Mixed Triple (Scalar) Product of three vectors S, P and Q represents the physical volume of a parallelepiped with edges S, P and Q • Recall that PxQ represents the area of a parallelogram with sides P and Q and gives a vector V whose direction is perpendicular to the plane containing P and Q.
The dot product of S and V is the product of the magnitudes of S and V and the cosine of the angle between S and V. This is the product of the magnitude of V (which is the area of a parallelogram with sides P and Q) and the scalar projection of S in the direction of V. This is in effect, area multiplied by height which give the volume of the parallelepiped. (See Fig. 3.24 and 3.25 in the textbook)
Properties of Mixed Triple Product • S . (PxQ) = P . (QxS) = Q . (SxP) = (SxP) . Q • Observe that the cyclic order S, P, Q, S, P, Q of the vectors have been maintained in the relationships above to ensure consistency of the signs. Also note that using the first and last expressions: S . (PxQ) = (SxP) . Q • The necessary condition for three vectors S, P and Q to all lie in the same plane is that their mixed triple scalar product be zero, i.e. If S, P and Q are coplanar, then S . (PxQ) = 0 (the parallelepiped has zero volume)
Moment of a Force about a line or axis • The moment of a force about a line may be evaluated by determining the moment of the force about any point on the line and then computing the scalar projection of the moment vector in the direction of the line • Recall that the moment of a vector F about a point is given by the cross product of a position vector r (acting from the point to any point on the line of action of F) and F; i.e. M = r x F
To determine the scalar component (magnitude) MA of the moment vector M with respect to the axis A, a unit vector e along the axis A is obtained and used in the dot product with M. Thus, MA = l ·M = l ·(rxF) which is a triple scalar product (mixed triple product).
Since the moment of a force about a line is a vector quantity, the scalar component is converted into a vector by multiplication by the unit vector along the axis in the direction of interest. Hence MA = [l · (rxF)]l • This expression indicates that the moment of a force about a line is simply the projection on the line of the moment vector about any point on the line.
Example 1 • Determine the moment of the force F which has a magnitude of 12.45 kN and direction angles qx = 66.3o, qy = 55.8o and qz = 43.7o about the line OA = 3i + 4k. The point O is at the origin and F is applied at point P(3,6,4).
Example 2 • If force F = 5i + 7j + 9k acts at point P(3,6,4), calculate the scalar component of the moment of this force about a line OA, from the origin (0,0,0) to A (3,0,4).
Example 3 • Given the moment vector M = 10i + 15j + 20k kNm, determine its scalar component along the line OA, defined by the vector 8j +6k.
Special Cases for the Moment of a Force about a Line (Bedford and Fowler see Fig. 4.23) • When the line of action of F is perpendicular to the plane containing the line L, then ML| = |F| · d where d is perpendicular distance between L and line of action of F • ( See fig - 4.23 in text ) |MX| = 50 x 3 = 150 Nm |MX| = -150i Nm because direction is opposite to positive x axis (from the Right Hand Rule)
Special Cases 2:(Moment of a Force about a Line) • When the line of action of F is parallel to the line L, then |ML| = 0 and ML = 0 (null vector) • Reason: • r x F will be perpendicular to both r and F and since F is parallel to L, it implies that r x F is also perpendicular to L. Hence scalar projection of r x F in the direction of L is zero since cos90 is zero.
Special Cases 3: (Moment of a Force about a Line) • When the line of action of F intersects the line L, then |ML| = 0 and ML = 0 (null vector) • Reason: Since moment of F is about any point on L, the point of intersection can be selected and since F passes through this point, its moment about the point is zero • (r = 0)
Moment of a Couple • Couple: a pair of forces that have the same magnitude, parallel lines of action but opposite sense • The effect of a a couple acting on a rigid body is to to cause the rigid body to rotate • The moment of a couple is the sum of the moments of the pair of forces F and -F (which constitute the couple) taken about any point M = r x F
d F1 r1/2 F2 (180 - ) 1 Moment of F1 about 2 2 F1 = F = -F2
2 (180 - ) F1 r2/1 F2 d 1 Moment of F2about 1 *Note that the direion of M is perpendicular to the plane containing the couple and is determined by the right hand screw rule
Two couples are said to be equivalent if they have the same momentM, that is, they tend to imart the same rotations on a rigid body. The sume of two couples is itself a couple which is obtained by vector addition. A couple may be represented by a vector called the couple vector which is equal in magnitude and direction to the moment M of the couple. Resolution of a Given force into a force at another piont and a couple Any force F acting on a rigid body may be moved to an arbitrary point O provided that a couple is added, of moment equal to the moment of F about O