Download
1 / 1
10 likes | 126 Views
Introduction. ImAP RSD Image Acquisition and Processing of Remote Sensing Data. Inertial Measurement Unit IMU. Abstract

E N D
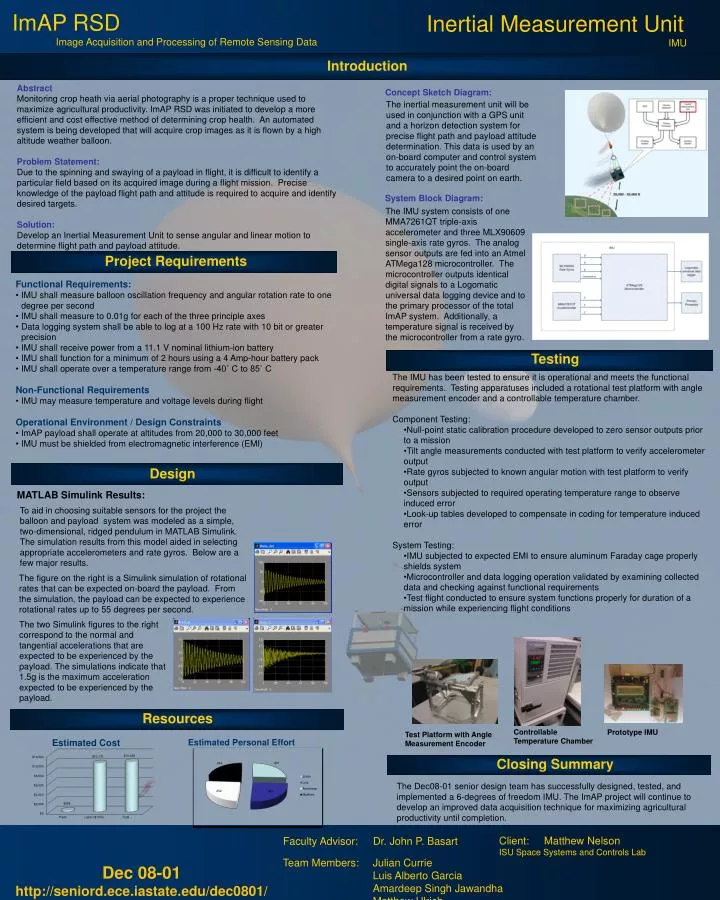
Introduction ImAP RSD Image Acquisition and Processing of Remote Sensing Data Inertial Measurement Unit IMU Abstract Monitoring crop heath via aerial photography is a proper technique used to maximize agricultural productivity. ImAP RSD was initiated to develop a more efficient and cost effective method of determining crop health. An automated system is being developed that will acquire crop images as it is flown by a high altitude weather balloon. Problem Statement: Due to the spinning and swaying of a payload in flight, it is difficult to identify a particular field based on its acquired image during a flight mission. Precise knowledge of the payload flight path and attitude is required to acquire and identify desired targets. Solution: Develop an Inertial Measurement Unit to sense angular and linear motion to determine flight path and payload attitude. Concept Sketch Diagram: The inertial measurement unit will be used in conjunction with a GPS unit and a horizon detection system for precise flight path and payload attitude determination. This data is used by an on-board computer and control system to accurately point the on-board camera to a desired point on earth. System Block Diagram: The IMU system consists of one MMA7261QT triple-axis accelerometer and three MLX90609 single-axis rate gyros. The analog sensor outputs are fed into an Atmel ATMega128 microcontroller. The microcontroller outputs identical digital signals to a Logomatic universal data logging device and to the primary processor of the total ImAP system. Additionally, a temperature signal is received by the microcontroller from a rate gyro. Project Requirements • Functional Requirements: • IMU shall measure balloon oscillation frequency and angular rotation rate to one degree per second • IMU shall measure to 0.01g for each of the three principle axes • Data logging system shall be able to log at a 100 Hz rate with 10 bit or greater precision • IMU shall receive power from a 11.1 V nominal lithium-ion battery • IMU shall function for a minimum of 2 hours using a 4 Amp-hour battery pack • IMU shall operate over a temperature range from -40˚ C to 85˚ C • Non-Functional Requirements • IMU may measure temperature and voltage levels during flight • Operational Environment / Design Constraints • ImAP payload shall operate at altitudes from 20,000 to 30,000 feet • IMU must be shielded from electromagnetic interference (EMI) Testing • The IMU has been tested to ensure it is operational and meets the functional requirements. Testing apparatuses included a rotational test platform with angle measurement encoder and a controllable temperature chamber. • Component Testing: • Null-point static calibration procedure developed to zero sensor outputs prior to a mission • Tilt angle measurements conducted with test platform to verify accelerometer output • Rate gyros subjected to known angular motion with test platform to verify output • Sensors subjected to required operating temperature range to observe induced error • Look-up tables developed to compensate in coding for temperature induced error • System Testing: • IMU subjected to expected EMI to ensure aluminum Faraday cage properly shields system • Microcontroller and data logging operation validated by examining collected data and checking against functional requirements • Test flight conducted to ensure system functions properly for duration of a mission while experiencing flight conditions Design MATLAB Simulink Results: To aid in choosing suitable sensors for the project the balloon and payload system was modeled as a simple, two-dimensional, ridged pendulum in MATLAB Simulink. The simulation results from this model aided in selecting appropriate accelerometers and rate gyros. Below are a few major results. The figure on the right is a Simulink simulation of rotational rates that can be expected on-board the payload. From the simulation, the payload can be expected to experience rotational rates up to 55 degrees per second. The two Simulink figures to the right correspond to the normal and tangential accelerations that are expected to be experienced by the payload. The simulations indicate that 1.5g is the maximum acceleration expected to be experienced by the payload. Resources Controllable Temperature Chamber Prototype IMU Test Platform with Angle Measurement Encoder Estimated Cost Estimated Personal Effort Closing Summary The Dec08-01 senior design team has successfully designed, tested, and implemented a 6-degrees of freedom IMU. The ImAP project will continue to develop an improved data acquisition technique for maximizing agricultural productivity until completion. Client: Matthew Nelson ISU Space Systems and Controls Lab Faculty Advisor: Dr. John P. Basart Team Members: Julian Currie Luis Alberto Garcia Amardeep Singh Jawandha Matthew Ulrich Dec 08-01http://seniord.ece.iastate.edu/dec0801/