Download
1 / 62
710 likes | 1.27k Views
Common Data Set Comparison: the GeoSwath Plus Interferometric Sonar vs Beamforming Multibeam Data. Shallow Survey 2008 Tom Hiller, Advanced Products Manager, GeoAcoustics Ltd. James Baxter, Senior Engineer, GeoAcoustics Ltd. Presentation Overview: - Collecting the GeoSwath Dataset

E N D
Common Data Set Comparison: the GeoSwath Plus Interferometric Sonar vs Beamforming Multibeam Data Shallow Survey 2008 Tom Hiller, Advanced Products Manager, GeoAcoustics Ltd. James Baxter, Senior Engineer, GeoAcoustics Ltd. WORLD CLASS – through people, technology and dedication
Presentation Overview: • - Collecting the GeoSwath Dataset • Data Processing • The GeoSwath Data Results • Comparison Areas • Conclusions
GeoSwath Plus Survey of Portsmouth Harbour Survey date: week of 20th July 2008 Sonar: GeoSwath Plus 500KHz Attitude and position: POS MV with RTK GPS
Vessel and mount: R/V Coastal Surveyor - Captain Ben Smith Sonar on vessel’s bow mounted - including subsea POS-MV housing
The GeoSwath interferometric sonar Side scan transmit geometry Simultaneous bathymetry and amplitude data products
Sonar Geometry e d c b a
Other Equipment Used: • Boat’s bow mount • 500kHz GeoSwath Plus • RTK positioning • POSMV Attitude • POSMV Heading • Valeport Mini-SVS • Valeport SVP sensor • Tritech Echosounder • 1PPS Timing • 50Hz attitude • 10Hz position • Local tide data
Line Planning Depths: 4m to 25m Side-scan search pattern (= every object has a shadow). Used 45m range setting which gave 15 pps (=7pps/side) Survey speed ~6kts = average of 2.3 pings/m In>7m depth: Processed Bathy Swath Width: 80m (40m per side) Line spacing: alternate 30m/60m In<7m depth: Processed Bathy Swath width 70m (35m per side) Line spacing: alternate 25m/50m
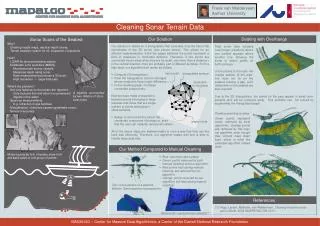
GeoSwath Data Processing Amplitude filtering▼Statistical filtering▼Binning Key steps:
Filtering data in the shallow areas Essentially a very simple methodology: use additional information (e.g. amplitude) and information from dense local data to flag non-matching points as outliers. Outliers will not contribute to gridded depths
Every point shown (10-250 in each 1m bin) 1m Gridded data
Typical motion data (500s of data shown below) Roll 8 deg Pitch 5 deg Heave 1m
SV Dips Typical SV gives 50cm corrections at swath edges
Changes in Sound Velocity at the head Near-Coast Line CTS001 (N-S) 2m/s Sound Velocity at the head
Line CTS005 (N-S) 2m/s Sound Velocity at the head
Line CTS038 (N-S) 2m/s Sound Velocity at the head
Cross-Line CTS060 (E-W) 5m/s Sound Velocity at the head
Sound Velocity compared to dynamic transducer depth Roll Pitch Heave Blue: Pitch (range -2.7º to +2.4º) Black: miniSVS (range 1507.3m/s to 1510.1m/s) Heave range is -0.42m 0.46m, ~5s period 1 minute of data is shown from the middle of line CT038
The Area Covered: ~4200m x ~1250mabout 20 hours of running lines
100m Near-shore detail 5cm contours, 4m deep (NW corner) to 6m deep (SE)
Profile along the line (A-B): N B A m
Small heave artefacts in the flat area 2cm 130m profile along a ~flat part of line CTS038
m Resolving Objects
Three data sets with (some) overlap were available • EM3002D • Reson 7125 (to ellipsoid) • GeoSwath Plus 500kHz (to tide datum) • Note that not all the data were available for comparison, see next slide.
GeoSwath and EM3002 overlap Dashed box shows overlap : overlap for available 7125 data was similar
Overall differences of the overlap areas • GeoSwath – EM3002D: 20cm mean difference, 6cm SD • GeoSwath – 7125: 29.48m mean difference, 7cm SD • 7125 – EM3002D: 29.28m mean difference, 5.5cm SD
Notes Processing paths for EM and 7125 data unknown: supplied as 1m xyz, probably smoothed & re-gridded? 7125 was referenced to the ellipsoid. The reason for the bust between EM and GS+ data has not been tracked down yet. The following comparison images have been made after offsetting data to the same mean, for clarity. Slight positioning differences of features in the 3 datsets: grid processing effects?