Download
1 / 9
90 likes | 238 Views
RTEMS and Linux at the Canadian Light Source. Tony Wilson Canadian Light Source University of Saskatchewan. Current Status. Injector: Linac 250 MeV Booster is a 250 MeV to 2.9 GeV synchrotron Commissioned and operational Storage ring :

E N D
RTEMS and Linux at the Canadian Light Source Tony Wilson Canadian Light Source University of Saskatchewan
Current Status • Injector: • Linac 250 MeV • Booster is a 250 MeV to 2.9 GeV synchrotron • Commissioned and operational • Storage ring : • 2.9 GeV ring 170 m circumference, DBA lattice 12 fold • Commissioned and Operational • 5 Insertion devices being installed during 2004 • User Beamlines • 7 beamlines to be installed and commissioned in 2004. • 5 additional beamlines being designed and installed 2005-2007. • EPICS used for all high level control on main machine and beamlines.
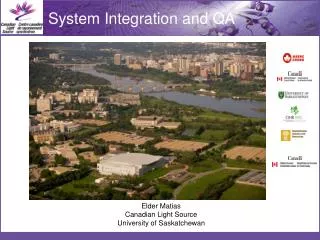
System Architecture MS-SQL Server MS-Win OPI Linux OPI Linux OPI Linux Touch Panel OPI Linux Network Server (bootp, dhcp, auto restore) Linux Data Archive Server Linux Alarm Server MS-Win VLANs for: each beamline, machine control, development, office, visitors PowerEdge IOC Linux VME Crate (Reflective Memory) EROC IOC RTEMS IOC Step Controller RTEMS PS Boards IOC RTEMS EROC IOC RTEMS IOC Linux 1Gig Bridge MicroStep Field Dev. RS-232 Devices MicroStep Power Supplies Ethernet Devices PLC & GPIB Profibus PLC Motors Field Dev. Motors Magnets Field Dev. Field Dev.
RTEMS and CLS controller • EPICS version 3.14.beta1 running RTEMs version 20011025(do not use VxWorks) • IOCs are CLS embedded controllers (approx 125) - processor MC68360 25 MHz - 16 Meg RAM - 4 serial ports and console port - easy to deploy, mounts in a 19” rack • Pros and Cons: - No dynamically loaded library, so executable must be linked prior to download - large number of IOCs (separation of function but more points of failure) - each requires a network drop - RTEMS is open source (FreeBSD license terms) • Problems: - possible memory incompatibility problem - IOC connected to 5 MODBUS PLCs was overloaded
SIL Micro-step Driver • Configuration based on locally developed Single Board Computer (running EPICS/RTEMS) Stepper Motor Controller and Stepper Driver
CLS Motor Controller • 16MB, 72 pin, 60 ns DRAM with parity • 256 kilobyte Flash memory • 10baseT Ethernet port • Can control up to 8 motors • Uses Motorola 68360 microprocessorBDM connector (background debug mode) • Console RS-232 port37 input/output connections (general purpose I/O)
Linux and VME • Using VME hardware by Linux pc connected. • SIS1100 pci card <-> fiber optic link <-> SIS3100 VME modulewith a Linux driver • maps VME backplane to IOC application. • Advantages: - pc can be physically separated from VME crate. - more than one VME crate per pc - multiple applications can access the same crate. - high throughput 25 Mbytes/sec block transfer. - cost €1800 (20 thousand hockey pucks) • Limited amount of work ongoing on a RTEMS support.
VME • Uses: - orbit correction: read beam position monitors, write to orbit correctors. - Oregon Micro Systems VME58 stepping motor controller. - Heidenhain ROQ425 EnDat absolute encoder. use MMI200 PC104 card on a VISA DCP104 made by DYNATEM - various other scalers, ADCs and digital IO on beamlines