Download
1 / 4
40 likes | 203 Views
12 General Kinetics H 2 O 2 thrusters. Lander Side view. Lander Top view. Lander Attitude Control. Based on Rauschenbakh, Ovchinnikov, and McKenna-Lawlor. . . θ. θ. + θ 1. + θ 1. θ. θ. - θ 1. - θ 1. No External Torque. “Large” External Torque. Attitude Prop Mass Estimate.

E N D
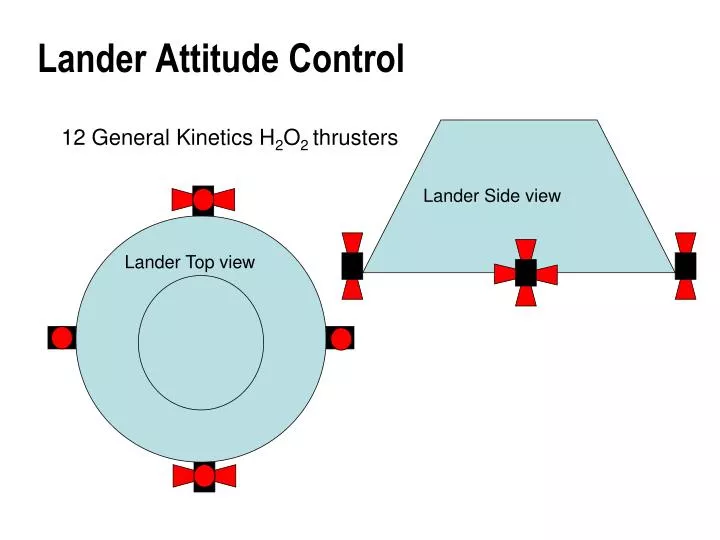
12 General Kinetics H2O2 thrusters Lander Side view Lander Top view Lander Attitude Control
Based on Rauschenbakh, Ovchinnikov, and McKenna-Lawlor . . θ θ +θ1 +θ1 θ θ -θ1 -θ1 No External Torque “Large” External Torque Attitude Prop Mass Estimate Mb = external moment applied g = gravitational acceleration Isp = specific impulse of thrusters L = distance from thruster to vehicle center of mass
Spinning Lander Attitude Control • Propellant and thrusters still needed for spin up and axis reorientation • Estimate ~2.2 kg propellant savings for 100g/10kg cases • Additional mass: spinning landing gear, propulsion system redesigns, additional attitude sensing devices • Increased complexity: Liquid propellant feed while spinning, landing while spinning, reorientation of axis
Some or all travel could be obtained from bouncing using stored descent energy Compressed gas not recommended – highly temperature sensitive, limited velocity and acceleration inputs Commercial gas springs limited to approx. -23° to 82° Lunar surface temperature -153° to 107° C Compressed Gas Spring Energy Storage