Download
1 / 42
470 likes | 1.05k Views
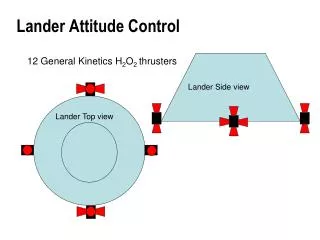
Attitude Determination and Control. Dr. Andrew Ketsdever MAE 5595. Outline. Introduction Definitions Control Loops Moment of Inertia Tensor General Design Control Strategies Spin (Single, Dual) or 3-Axis Disturbance Torques Magnetic Gravity Gradient Aerodynamic Solar Pressure

E N D
Attitude Determination and Control Dr. Andrew Ketsdever MAE 5595
Outline • Introduction • Definitions • Control Loops • Moment of Inertia Tensor • General Design • Control Strategies • Spin (Single, Dual) or 3-Axis • Disturbance Torques • Magnetic • Gravity Gradient • Aerodynamic • Solar Pressure • Sensors • Sun • Earth • Star • Magnetometers • Inertial Measurement Units • Actuators • Dampers • Gravity Gradient Booms • Magnetic Torque Rods • Wheels • Thrusters
Introduction • Attitude Determination and Control Subsystem (ADCS) • Stabilizes the vehicle • Orients vehicle in desired directions • Senses the orientation of the vehicle relative to reference (e.g. inertial) points • Determination: Sensors • Control: Actuators • Controls attitude despite external disturbance torques acting on spacecraft
Introduction • ADCS Design Requirements and Constraints • Pointing Accuracy (Knowledge vs. Control) • Drives Sensor Accuracy Required • Drives Actuator Accuracy Required • Rate Requirements (e.g. Slew) • Stationkeeping Requirements • Disturbing Environment • Mass and Volume • Power • Reliability • Cost and Schedule
Introduction Z Nadir Y X Velocity Vector
Desired Attitude e.g. +/- 3 deg Ram pointing Actual Attitude e.g. – 4 deg Ram pointing Commands e.g. increase Wheel speed 100rpm Attitude Control Task Attitude Actuators Attitude Determination Task Attitude Sensors Estimated Attitude e.g. – 3.5 deg Ram pointing Control Loops Disturbance Torques Spacecraft Dynamics - Rigid Body - Flexible Body (non-rigid)
Mass Moment of Inertia where H is the angular momentum, I is the mass moment of inertia tensor, and W is the angular velocity where the cross-term products of inertia are equal (i.e. Ixy=Iyx)
Mass Moment of Inertia • For a particle • For a rigid body
Mass MOI Rotational Energy:
Mass MOI • Like any symmetric tensor, the MOI tensor can be reduced to diagonal form through the appropriate choice of axes (XYZ) • Diagonal components are called the Principle Moments of Inertia
Mass MOI • Parallel-axis theorem: The moment of inertia around any axis can be calculated from the moment of inertia around parallel axis which passes through the center of mass.
Gravity Gradient Stabilization • Deploy gravity gradient boom • Coarse roll and pitch control • No yaw control • Nadir pointing surface • Limited to near Earth satellites Best to design such that Ipitch > Iroll > Iyaw
Spin Stabilization • Entire spacecraft rotates about vertical axis • Spinning sensors and payloads • Cylindrical geometry and solar arrays
Spin Stability UNSTABLE STABLE S S T T
Satellite Precession • Spinning Satellite • Satellite thruster is fired to change its spin axis • During the thruster firing, the satellite rotated by a small angle Df • Determine the angle Dy Dy H F w Df R F
Dual Spin Stabilization • Upper section does not rotate (de-spun) • Lower section rotates to provide gyroscopic stability • Upper section may rotate slightly or intermittently to point payloads • Cylindrical geometry and solar arrays
3-Axis Stabilization • Active stabilization of all three axes • Thrusters • Momentum (Reaction) Wheels • Momentum dumping • Advantages • No de-spin required for payloads • Accurate pointing • Disadvantages • Complex • Added mass
External Disturbance Torques NOTE: The magnitudes of the torques is dependent on the spacecraft design. Drag Torque (au) Gravity Solar Press. Magnetic LEO GEO Orbital Altitude (au)
Internal Disturbing Torques • Examples • Uncertainty in S/C Center of Gravity (typically 1-3 cm) • Thruster Misalignment (typically 0.1° – 0.5°) • Thruster Mismatch (typically ~5%) • Rotating Machinery • Liquid Sloshing (e.g. propellant) • Flexible structures • Crew Movement
z y q Gravity Gradient Torque where:
Magnetic Torque where: • *Note value of m depends on S/C size and whether on-board compensation is used • - values can range from 0.1 to 20 Amp-m2 • - m = 1 for typical small, uncompensated S/C
Aerodynamic Torque where:
Solar Pressure Torque where:
Disturbing Torques • All of these disturbing torques can also be used to control the satellite • Gravity Gradient Boom • Aero-fins • Magnetic Torque Rods • Solar Sails
Attitude Determination • Earth Sensor (horizon sensor) • Use IR to detect boundary between deep space & upper atmosphere • Typically scanning (can also be an actuator) • Sun Sensor • Star Sensor • Scanner: for spinning S/C or on a rotating mount • Tracker/Mapper: for 3-axis stabilized S/C • Tracker (one star) / Mapper (multiple stars) • Inertial Measurement Unit (IMU) • Rate Gyros (may also include accelerometers) • Magnetometer • Requires magnetic field model stored in computer • Differential GPS
Attitude Control • Actuators come in two types • Passive • Gravity Gradient Booms • Dampers • Yo-yos • Spinning • Active • Thrusters • Wheels • Gyros • Torque Rods