Download
1 / 27
290 likes | 447 Views
Spacecraft Attitude Determination Using GPS Signals. C1C Andrea Johnson United States Air Force Academy. Outline. Concept review/ Prior work Goals Receiver arrangement Integer resolution Assumptions/ Coordinate Frames Minimizing the loss function Results Conclusions Recommendations.

E N D
Spacecraft Attitude Determination Using GPS Signals C1C Andrea Johnson United States Air Force Academy
Outline • Concept review/ Prior work • Goals • Receiver arrangement • Integer resolution • Assumptions/ Coordinate Frames • Minimizing the loss function • Results • Conclusions • Recommendations
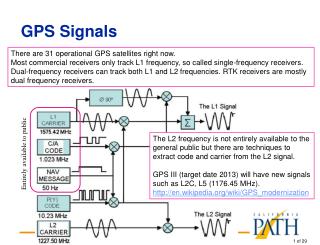
Concept Review • Two receivers detect the same GPS satellite signal • Phase differences can be used to determine the angle of the line defined by the 2 receivers
Concept Review Cont. • Determine matrix, A, that transforms baseline vector from body frame to LO • Issues • Find n • Accurate loss function minimization
Prior Work • Minimizing the loss function • Linear least squares • ALLEGRO (Attitude-Lean-Loping-Estimator using GPS Recursive Operations)
Prior Work Cont. • Linear least squares with motion-based integer resolution: • Non-linear, predictive filter assuming n has already been resolved:
Project Goals • Integer resolution algorithm • Non-IC dependent minimization technique incorporating integer phase difference measurements • Design computer code to perform attitude determination
Master antenna Slave antenna Intermediate antenna Receiver Arrangement 12.50.5λ • 2 master antennas, 2 slaves, 4 intermediate • Non-military frequency: 1575.42 MHz, λ = 0.1903 m 12.50.5λ 5λ
2λ 3λ Φ1 Φ3 Φ2 Integer Resolution • Intermediate receivers • Variation of integer search • Unique solution to 2 phase difference measurements if baselines not multiples of each other • Third provides check • Accurate even for large baselines
zlo xlo ylo Assumptions/ Coordinate Frames • Algorithm uses single set of 3 receivers • Same 2 GPS satellites always in view • No masking or multipathing • “Inertial” reference frame: local orbital • Body frame = LO when roll, pitch, and yaw = 0
Minimizing the Loss Function • Linear • Diverges for poor initial guesses • Motion-based integer resolution • ALLEGRO • Does not account for n in algorithm • Separate motion-based integer resolution • Gauss-Newton • Not sensitive to initial conditions • Always converges • Designed for minimization of squared functions
Minimizing the Loss Function Cont. • Generating Test Data • 3 orbit propagators • 1 for spacecraft, 2 for GPS satellites • 2-body EOM, no perturbations • Ode5/Dormand-Prince numerical integration • Fixed time-step: 1 sec • 1 hour simulation
Minimizing the Loss Function, Cont. • 1 attitude propagator • Euler moment, no disturbance torques • Initialization program generates actual fractional phase differences and quaternions • Noise added with
Minimizing the Loss Function, Cont. • Gauss-Newton/ Gauss-Newton-Levenberg-Marquardt • Receiver locations written in body frame coordinates, units of wavelengths
Minimizing the Loss Function, Cont. • Unknown value is the A-matrix, must be converted to a vector for GN/GNLM
Minimizing the Loss Function, Cont. • Minimization equation requires solving for state using Gaussian elimination or decomposition • This is GN method
Minimizing the Loss Function, Cont. • Sometimes a singularity occurs: • To counter this, an additional term is needed: • If the singularity still occurs, multiply λ by 10 and recalculate
Minimizing the Loss Function, Cont. • Defining variables:
Minimizing the Loss Function, Cont. • Jacobian matrix:
Minimizing the Loss Function, Cont. • Determining attitude from the transformation matrix:
Minimizing the Loss Function Cont. Orbit Propagators (3) GPS 1, GPS 2, & S/C IJK vectors Initialization Program Attitude Propagator S/C actual quaternion 3 noisy Phase measurements Transformation matrix/ quaternions GN/ GNLM Program Integer Resolution Program 3 integer phase differences
Conclusions • Significant errors caused by several factors • GN/GNLM intended for vectors of parameters, not vectorized matrix • Use of constant to prevent singularities • Linear receiver arrangement • Only 2 sightlines used (minimum of 4 available) • GN/GNLM sensitive to measurement errors
Conclusions, Cont. • ALLEGRO remains most accurate • GN/GNLM with modifications may or may not perform better
Recommendations • Use matrix for singularity avoidance • Determine better method for comparing results of matrix calculations (compare entire matrix, elements thereof, or a combination of both) • Integrate integer resolution algorithm into GN/GNLM algorithm • If cannot use GN/GNLM, incorporate integer resolution algorithm into ALLEGRO algorithm