Download
1 / 28
290 likes | 518 Views
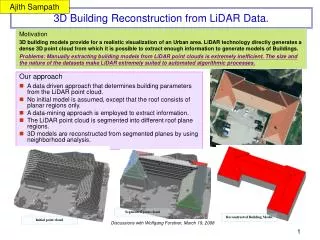
Fast and Extensible Building Modeling from Airborne LiDAR Data. Qian -Yi Zhou Ulrich Neumann University of Southern California. Introduction. Toward automatic 3D building model reconstruction … 3D models are useful in several applications Manual creation is slow and expensive

E N D
Fast and Extensible Building Modeling from Airborne LiDAR Data Qian-Yi Zhou Ulrich Neumann University of Southern California
Introduction • Toward automatic 3D building model reconstruction … • 3D models are useful in several applications • Manual creation is slow and expensive • New instruments provides more and more data • Problem • How to fulfill the gap between • data and 3D building models?
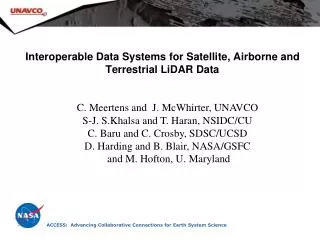
Introduction • Approach overview • Data source: airborne LiDAR data • Without other data sources • Working directly on point cloud, without rasterization • Experiments • On 3 different data sets • Automatic vs. interaction • Fully automatic for flat roofs • Use interaction to acquire the extensibility for non-flat roof patterns
Pipeline Input LiDAR data Classified points Planes of one patch Classification Plane extraction Boundary detection Building model Boundary points Modeling
Pipeline Input LiDAR data Classified points Planes of one patch Classification Plane extraction Boundary detection Building model Boundary points Modeling
Classification • Algorithm • Use a SVM (Support Vector Machine) algorithm • Machine learning method • All the weight parameters could be trained from a small area of labeled data • Take several differential geometry properties as features • Features are defined locally • Same solution works for different data sets, even their global variants (e.g. absolute height) varies
Classification • Features: Building (ground) vs. vegetation • Distribution of neighbor points • Regular vs. Irregular • Normal direction • Vertical vs. Unordered • Flatness • Flat vs. Non-flat • Normal distribution • Regular vs. Irregular
Classification 0.0 0.5 1.0 Input LiDAR data F1 (regularity of distribution) F2 (normal direction) F3 (flatness) F4 (regularity of normal dist.) F5 (regularity of normal dist.)
Classification • Experiments for classification • Weights for features learned from data: • W1~5 = (2.5, 0.1, 1.7, 5.2, 20.4) • Regularities of normal distribution are important • We get around 95% accuracy rate on 3 different data sets • Sample rate of different data sets varies from 6 points per sq.m. to 17 points per sq.m. • Global variants (e.g. average height, average intensity) varies between different data sets
Classification • Post-processing • Refinement • Use the intuition that points of same category usually occur together in space • Let points in a local neighborhood vote for the final classification result • Segmentation • Apply region growing algorithm to find roof patches • Largest patch is assigned as ground
Pipeline Input LiDAR data Classified points Planes of one patch Classification Plane extraction Boundary detection Building model Boundary points Modeling
Plane extraction • Algorithm • For each roof patch, apply a region growing algorithm but based on normal similarity • Iteratively find all plane patterns in one roof patch
Pipeline Input LiDAR data Classified points Planes of one patch Classification Plane extraction Boundary detection Building model Boundary points Modeling
Boundary detection • Algorithm • Apply a uniform grid onto the point cloud P • Correspondence: • Boundary line in grid Boundary point of P • Boundary corner in grid Boundary edge of P • Run two passes, to construct a watertight manifold polygonal boundary from boundary points and edges
Boundary detection • Algorithm (continue) Boundary corners Boundary lines First pass Second pass
Boundary detection • Advantages • Topology guarantee: watertight manifold boundary • Easy to implement • Efficient and robust • Can be used withmorphological operations • Limitation • Cannot guarantee geometry completeness
Pipeline Input LiDAR data Classified points Planes of one patch Classification Plane extraction Boundary detection Building model Boundary points Modeling
Building modeling • Principal directions • Intuition: most boundary line segments in a local area fall into a couple of directions, known as principal directions 6 7 2 3 1 4 5
Building modeling • Snapping • Snap to principal directions • Find as much as possible boundary segments along principal directions • Snap between neighbor segments • Patches may share same boundary segments • Patches may be connected via a vertical wall
Pipeline Non-flat roofs Input LiDAR data Classified points Planes of one patch Classification Plane extraction Non-flat roof extension Boundary detection User interaction Building model Boundary points Modeling
Non-flat objects extension • Algorithm • Define a few pattern types, e.g. cone, sphere, cylinder • Let user specify pattern type of certain roof patch • Apply RANSAC algorithm to get the parameters for this shape pattern
Experiments • Oakland (17 samples/sq.m.; 600m x 600m)
Experiments • Denver (6 samples/sq.m.; 1km x 1km)
Experiments • Industrial site (14 samples/sq.m.)
Conclusion • We provide an automatic building modeling pipeline with novel classification, boundary extraction and modeling algorithms; in addition, we show the extensibility to non-flat roofs with the help of a few user interactions. • Future works • How to quantitatively analysis errors? • How to handle data sets with billions of points? • An out-of-core implementation is possible!
The end • Q & A • Acknowledgement • Data • Airborne 1 Corp., Sanborn Corp., Chevron Corp., Sentinel AVE LLC • Discussion and comments • Suya You, Yuan Li, and anonymous reviewers • Support • Provost’s Fellowship from USC