Download

1 / 15
160 likes | 306 Views
Chemical Plume Tracing. Jay A. Farrell, Professor Department of Electrical Engineering University of California, Riverside 92521 e: farrell@ee.ucr.edu v: 909-787-2159 f: 909-787-2425 url: www.ee.ucr.edu/~farrell. Autonomous Vehicle Based Chemical Plume Tracing. Objectives:

E N D
Chemical Plume Tracing Jay A. Farrell, Professor Department of Electrical Engineering University of California, Riverside 92521 e: farrell@ee.ucr.edu v: 909-787-2159 f: 909-787-2425 url: www.ee.ucr.edu/~farrell
Autonomous Vehicle Based Chemical Plume Tracing • Objectives: • Develop strategies for an AUV to trace a chemical plume to its source. • Methods: • On-line deliberative planning • On-line reactive planning • On-line mapping • Applications: • Detection, localization,mapping of unexploded ordinance, thermal vents, etc
Moth Flight Tracks top view 100 displacement in ‘y’ 0 wind -100 200 800 600 400 200 0 displacement in ‘x’ 0 end view -200 200 side view -75 0 75 displac’t in ‘z’ 0 wind displacement in ‘z’ wind displac’t in ‘y’ -200 800 600 400 200 0 displacement in ‘x’ Moths, birds and other biological entities exhibit such cross-track oscillationsn Graphics from Carde and Justus at UCR
CPT Challenges • Our goal is to track plumes to their source over near kilometer distances • Chemical distribution is intermittent and meandering: • gradient following is not possible • The chemical distribution is likely to be constrained to very low altitudes • Approach: Decomposition into Plume Search Components • Plume finding • Plume tracking • Plume reacquisition • Declaration of success: “odor source at (x,y)”
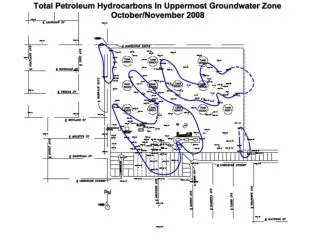
In-water Experimental Results • 7 of 8 Successful Missions • OpArea outlined in green • Trajectory in red • Chemical detections in blue
Can we use Chemical Gradients? Movie by Todd Cowen, Cornell
Can Plume width predict range? Movie by Todd Cowen
Acknowledgement: Funded by the Office of Naval Research • Open Issues and Future Research: • algorithms to work robustly in the presence of multiple sources • algorithms to map “source free” areas • integration of additional behaviors incorporating data from other sensors
Research Interests • On-line function approximation based control • - Aircraft control subsequent to battle damage • - Respirator control (w/ local industry) • High bandwidth cm level accuracy vehicle state estimation • - Snowplow guidance • - Automated highway systems • Behavior based planning • - Chemical plume tracing