Download
1 / 41
420 likes | 630 Views
Motores DC Brushless e AC Brushless. Brushless = sem escovas Brushless corresponde à designação genérica de algumas classes de servomotores; Entendendo-se servomotores como motores aplicados em máquinas ferramentas, robôs, instrumentação, automação industrial, etc. BLDC.

E N D
Motores DC Brushless e AC Brushless • Brushless = sem escovas • Brushless corresponde à designação genérica de algumas classes de servomotores; • Entendendo-se servomotores como motores aplicados em máquinas ferramentas, robôs, instrumentação, automação industrial, etc.
PMmotors – motores com ímas permanentes • Avanços recentes (1990 em diante): disponibilidade de ímãs permanentes de alta coercitividade e magnetismo residual; • Coercitividade – Hc: O ponto Hc corresponde à coercitividade do ímã e significa o valor de desmagnetização que deve ser aplicado para reduzir a densidade de fluxo produzida pelo ímã a zero.
PM motors – motores com ímas permanentes Magnetismo residual – Br: ponto Br corresponde à remanência do ímã e significa o valor máximo teórico de densidade de fluxo que pode ser obtida com este ímã. Isto somente seria possível nas condições de não haver nenhum campo externo desmagnetizante e caso o ímã estivesse completamente envolvido por um material de permeabilidade infinita.
Curva de Desmagnetização de um Imã Permanente • Br: unidade T (Tesla) mede densidade de fluxo magnético • Hc: unidade kA/m
Curva de Desmagnetização de um Imã Permanente • Dependendo da configuração do circuito magnético, o ímã sofre uma desmagnetização espontânea. O termo “desmagnetização” deve ser entendido não como uma perda irreversível da magnetização do ímã, mas como um deslocamento do seu ponto de operação sobre a curva BH, que passa a ser o ponto 1, por exemplo.
Curva de Desmagnetização de um Imã Permanente • Na presença de forças desmagnetizantes externas, como as decorrentes da reação de armadura, o ponto de operação pode ser deslocar ainda mais para a esquerda, por exemplo para o ponto 2.
Curva de Desmagnetização de um Imã Permanente • O gradiente da curva BH , rec, representa a permeabilidade relativa do ímã. Para ímãs de terras raras, como aqueles de Nd-Fe-B, os valores de rec estão na faixa de 1,0 a 1,1, isto é, têm valores muito próximos à permeabilidade do ar 0.
Curva de Desmagnetização de um Imã Permanente • A baixa permeabilidade relativa dos ímãs é uma característica favorável, porque limita os efeitos de desmagnetização a que estão sujeitos quando empregados em máquinas elétricas.
Brushless como variações dos PMSM – Motores Síncronos de Imãs Permanentes • PMSM • Brushless DC • IP surface mounted, fcem trapezoidal, corrente de alimentação retangular; • Controle de acionamento mais simples; • Não requer sensor de posição de alta resolução no rotor; • A cada ciclo elétrico, seis instantes de comutação das 3 fases devem ser monitorados
Brushless como variações dos PMSM – Motores Síncronos de Imãs Permanentes • PMSM • Brushless DC • Somente 1 sensor de corrente no link CC; • Drive de menor custo; • Torque mais pulsante; • Potência limitada a poucos kW; • Versões com 1, 2 e 3 (+ usada) fases;
Brushless como variações dos PMSM – Motores Síncronos de Imãs Permanentes • PMSM • Brushless DC • V < 48: carros, robôs; • V > 100: aplicações industriais;
Brushless como variações dos PMSM – Motores Síncronos de Imãs Permanentes • PMSM • Brushless AC • IP surface mounted ou internos; surface internos
Brushless como variações dos PMSM – Motores Síncronos de Imãs Permanentes • PMSM • Brushless AC • fcem e corrente de alimentação senoidais; • acionamento mais complexo; • sensor de posição de alta resolução;
Brushless como variações dos PMSM – Motores Síncronos de Imãs Permanentes • PMSM • Brushless AC • sensor encoder óptico ou resolver; • sensores de corrente em cada fase; • Necessária sincronização precisa da forma de onda da corrente com a posição angular do rotor em cada instante de tempo;
Brushless como variações dos PMSM • Brushless AC • Surface mounted • Rotor liso • Gap maior • Pouca capacidade de operar acima da velocidade nominal (L baixa, fixação dos ímãs)
Brushless como variações dos PMSM • Brushless AC • Ímãs internos • Pólos salientes • Torque de relutância • Torque maior (relutância +eletromagnético)
Brushless como variações dos PMSM surface internal
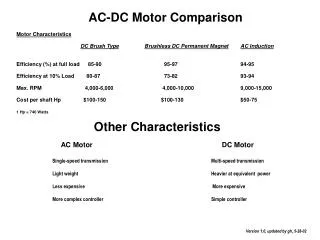
Drives de Velocidade Ajustável • DC Brush + controladores (tensão de armadura e corrente de campo) • DC Brushless + sensores • AC VVVF drives + Motores de Indução • AC Vectordrives + Motores de Indução
DC Brush - História • 1856 Siemens (‘The’ Siemens) • Ward Leonard (1930i – 1960s) • Final 60s: dispositivos com SCR • de 90 a 92%
DC Brushless - História • 1962: Máquina DC com comutação de estado sólido • 1st large ( > 50 hp) DC Brushless motor - mid 1980s • 500 hp 1992 (Powertec Industrial Corporation) • from 90 to 92% • Typical rpm: 1750 at rated (500 V) voltage
Brushless DC • To replicate the action of the commutator,a magnetic encoder is mounted to sense the magnetic position of the fields on motors’ shaft; • The controller "sees" the magnetic position information and determines through simple logic which motor lead should have current going to a winding and which motor lead should return the current from the winding.
Brushless DC • The controller has power devices which connect the voltage on a capacitor bank to the correct motor lead at the correct time when the shaft encoder demands it. In this way the motor and controller act in the same way as a brush DC motor but without the brushes. • The controller is built in a very similar way to the controller used in an AC VVVF drive, or in an AC Vector drive because all three types use a PWM type of variable voltage control to their respective motors.
PM Motors and Drives • Line start • Inverter fed • Realimentação discreta a cada 60º elétricos; (fem trapezoidal) • Realimentação contínua; (fem senoidal)
Classificação • Gaiola (Cage): permite o controle em malha aberta (da operação do motor); • Alimentação por Inversor: é necessária alguma forma de detecção da posição do rotor – sensor de efeito Hall, encoders, resolvers ou estimativa sem sensores (sensorless);
Resolvers • São transformadores rotativos usados como detectores de posição angular em ambientes sujeitos à ruídos;
BLDC - Aplicações • Carga Constante: capacidade de variar velocidade mais importante que manter a velocidade fixada; • Exemplos: ventilação, bombeamento; • Carga Variável: capacidade de boa resposta dinâmica; • Exemplos: aplicações domésticas, automotivas, robótica
BLDC - Aplicações • Controle de posição; • Exemplos: CNC, controle de processos, controle de máquinas;
AC Brushless - Tipos • SMPM – Surface Mounted PM • IPM – Interior PM • SRM – Synchronous Reluctance Motors
SMPM • Vantagens: • Eficiência • Tamanho compacto • Usando Ferrite, densidade de potência comparável a MI • Boa resposta transitória;
SMPM • Desvantagens: • Retenção dos ímãs • Precisa sincronizar posição do rotor com alimentação do inversor; • Limitado a 5 kW pelo custo dos ímãs; • Risco de desmagnetização;