Download
1 / 19
190 likes | 324 Views
PAX River Competition. 2005 AUVSI Student UAV Competition. Pax River Competition. 3 rd Annual Association of Unmanned Vehicle Systems International Student UAV Competition Hosted by the U.S. Navy Program Executive Office for Strike Weapons and Unmanned Aviation

E N D
PAX River Competition BIG BLUE 3 Design Review University of Kentucky
2005 AUVSI Student UAV Competition Pax River Competition • 3rd Annual Association of Unmanned Vehicle Systems International Student UAV Competition • Hosted by the U.S. Navy Program Executive Office for Strike Weapons and Unmanned Aviation • June 30th – July 3rd at Webster Field (NAS Pax River) BIG BLUE 3 Design Review University of Kentucky
2003 and 2004 Competitions • Competition goals are to encourage undergraduate engineers to develop platforms capable of performing realistic autonomous operations and demonstrate low-cost innovative UAV designs BIG BLUE 3 Design Review University of Kentucky
Competition Details • Teams are required to takeoff (manual or autonomous), fly specified waypoints, locate and identify targets on the ground, and return for landing within the allotted time • Mission criteria includes autonomous flight, GPS waypoint navigation, target reconnaissance, ability to adjust to changing mission requirements BIG BLUE 3 Design Review University of Kentucky
Competition Details (continued) • Planes will have to fly within the altitudes of 50 and 500 feet • Mission will be carried out within a 2 mile range • Targets to recognize • 4x4 wooden targets of varying color • 10x10 concrete targets with lines • Teams will be given extra points for high resolution imagery BIG BLUE 3 Design Review University of Kentucky
2005 Competition • 15 teams will be entered in this year’s competition (30 schools have expressed interest) • Each team will consist of a team captain and nine other students • Only one grad student may accompany the team, and faculty advisors may only serve as safety pilots • Prizes: 1st - $5,000 2nd - $3,500 3rd - $1,500 BIG BLUE 3 Design Review University of Kentucky
Requirements Develop a Control System and Aircraft • Autonomous Flight Controller • Communication Link • Image Analysis • Hardware • Airframe and Propulsion System BIG BLUE 3 Design Review University of Kentucky
PAX River – Electrical Overview RC Receiver Power Supply 6V GPS CAN/Power Bus 1 1 4 Switch Board 2oz. Servos -Throttle -Rudder -Ailerons -Elevator Flight Control NI 4 4 RS 232 Communication Radio NI Video Camera RS 232 Mission Control NI Data Overlay RS 232 RS232 Analog Transmitter Sensors NI RS 232 Beacon Power Supply Communication Radio Video Receiver Still Camera NI TTL Alt: 2000 ft, speed 24 mph, Beacon Power Supply 12V BIG BLUE 3 Design Review University of Kentucky
Pax River Mission Control Mission Control Flight Control Command Interpreter Network Interface Imaging Network Interface Network Interface Network Interface Telemetry/ Flight Stations Communication BIG BLUE 3 Design Review University of Kentucky
Networking Requirements • Develop an embedded high speed interconnection network • Support various standard serial formats (I2C, SPI, RS232) • Provide a robust communication channel for high noise environments • Modular network architecture • Standard PCB design for mass production • Route power to other modules BIG BLUE 3 Design Review University of Kentucky
Network Fabric of Choice • CAN 2.0b • Is a high-integrity serial data communications bus for real time applications • Operates at data rates up to 1 Megabits per second • Has excellent error detection and confinement capabilities • Was originally developed by Bosch for use in cars • Is now being used in many other industrial automation and control applications • Additional Features • Pre-existing CAN aerospace protocol, which has been standardized by NASA as a next generation aviation bus BIG BLUE 3 Design Review University of Kentucky
Flight Control -MicroPilot MP2028 MP2028g commercial “full featured” autopilot Features • Altitude hold, Airspeed hold • GPS waypoint Navigation • 1000 programmable waypoints • Capable of autonomous launch/landing • User programmable feedback gains and flight parameters (even during flight) • Data log capability • Supports user modification of autopilot internals with XTENDER system BIG BLUE 3 Design Review University of Kentucky
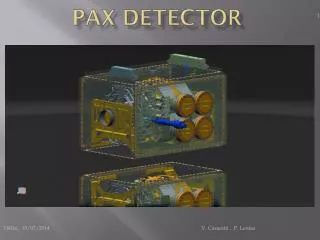
BB3 Pax River - Image Processing Analog frame grabber module • Enables the Matrox Odyssey Xpro to capture data all types of video sources. • Four completely independent high frequency and high fidelity video capture inputs. Pattern Matching Algorithm • A search algorithm whereby input frame patterns are acquired and matches are sought in a search database which consists of the various aviation directions. • Matrox Imaging library’s pattern matching algorithm is used to achieve this functionality. BIG BLUE 3 Design Review University of Kentucky
Ground Station • Primary Computer • Visual C++ and ActiveX Library • Read and parse telemetry from the serial port • Use telemetry to drive instruments • Target Recognition • GPS Waypoint Programming • Servos controlled by joystick • Secondary Computer • Same as primary but without control BIG BLUE 3 Design Review University of Kentucky
Fuselage Design and Component Placement Fuselage: Length: 4 ft Width: 3 ft Electrical Component Tray Video Radio RC Controller Batteries Fuel Tank GPS Engine Cameras located beneath component tray Flight Control Mission Control ATV Card Coms Radio Switch- board Beacon Static Margin=10%: CG= 25 to 27 inches from nose Center of Gravity Wing Center of Lift BIG BLUE 3 Design Review University of Kentucky
Aerodynamics • Fuselage • Based on NACA 4418 • Similar in style to Manta UAV • Provides good lift and stability • Model • Pro/E file has been created to facilitate any and all design changes required. • Easily adapted to Big Blue 3 inflatable wing design BIG BLUE 3 Design Review University of Kentucky
Aerodynamics and Control Requirements Requirements • Reduce weight • Reduce drag • Reduce moment • Provide stable flight to achieve mission objectives Pins to fasten rods Carbon fiber rods Servo mount BIG BLUE 3 Design Review University of Kentucky
Tail Design Attachment • Carbon Fiber Tubing • Roll Wrapped, Unidirectional • 1” OD slotted into slightly larger tubes • secured with pins • Servos mounted internally Pins to fasten rods Servo mount BIG BLUE 3 Design Review University of Kentucky
Pax River Propulsion Requirements/ Selection Requirements • Sustain flight for 40 minutes • Fly within a two mile radius • Ability to power 35 pound plane • Provide power for short takeoffs • Save weight if possible • Reliability Zenoah G-62 ~4.75 hp ~Able to lift 40 lbs plane 1.8 miles BIG BLUE 3 Design Review University of Kentucky