Download
1 / 13
140 likes | 181 Views
Linear Model Measurements with Application to Bird Flocking. Linear Model Measurements with Application to Bird Flocking. Scott A. Smolka Stony Brook University Joint work with Radu Grosu, Doron Peled, C.R. Ramakrishnan, Scott Stoller, Junxing Yang. Scott A. Smolka. Congratulations Ed!.

E N D
Linear Model Measurements with Application to Bird Flocking Linear Model Measurements with Application to Bird Flocking Scott A. Smolka Stony Brook University Joint work with Radu Grosu, Doron Peled, C.R. Ramakrishnan, Scott Stoller, Junxing Yang Scott A. Smolka
Congratulations Ed! • I first met Ed at Harvard in 1980, on occasion of visit by Amir Pnueli • Closely followed Ed’s work throughout his illustrious career • Finally got to work with Ed in 2009 with launch of NSF CMACS Expedition in Computing • Ed is mentor, friend, colleague, and inspiration!
Talk Outline • Flocking Model • Neighborhood-based Measurements • Path-based Measurements • Application to Flocking Goal: Model-measurement framework provides fitness values for parameter-optimization framework
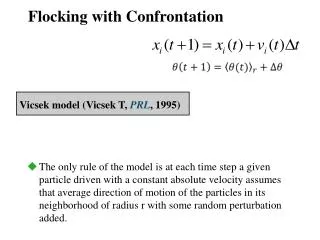
Flocking Model Cucker’s model Reynold’s model
Velocity Matching • Measures how well the velocities are aligned: • LTL property to be “measured”:
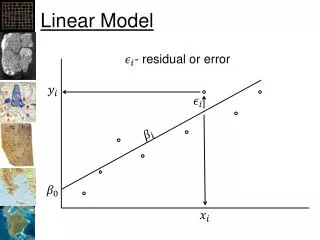
Neighborhood-Based Measurement • State space is a tuple • is finite set of states • is initial state • is transition relation • Components in each state • Tuple of measurement variables • Well-founded value set • Expressions based on that result in values from • Constants • Update function
Measurement Algorithm • With each clock tick, execute in each state • If is not minimal, then do • Send to all neighbors • Receivefrom neighbors • Update decreasing
Example Measurements • Find maximal value in a graph • Well-founded domain is the natural numbers with usual < • Decreasing expression E assigned to each state is simply d current maximal counter, initialized to width of the structure
Example Measurements (contd.) • CTL Model Checking • Variable for each subformula • Two counters: phase-counter and down-counter • For sub-formula e.g. : • LTL Model Checking: Let . • Measure linear combination of how fast becomes true in • +average value of VM while is true.
Path Measurements Paths may be infinite. Assume measurements are affected mainly by a finite prefix of sequences. Impose a limit on the length. Multiple paths in the structure (possibly infinite). Use generalized Monte Carlo measurements to conclude that a large enough number of executions has guaranteed some measurement threshold.
Generalized Monte-Carlo Measurements • Obtain joint estimate • of mean values of Boolean-real pairs • Additive approximation (AAA algorithm): • Multiplicative approximation (SRA and OAA algorithms):
Experimental Results Table 1. Results obtained from OAA Table 2. Results obtained from AAA Figure 1. Birds’ positions and velocities after 50 steps of simulation
V-formation • Model measurements as fitness in Genetic Algorithm • To achieve V-formation, measure • clear view + upwashbenefit Figure 2. Birds’ positions and velocities after 500 steps of simulation