Download
1 / 5
70 likes | 156 Views
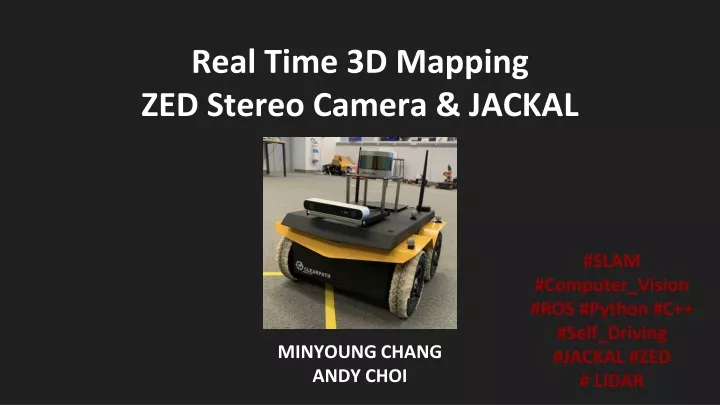
Implement real-time 3D mapping using ZED Stereo Camera and JACKAL for self-driving applications in ROS. This hardware setup tutorial covers LIDAR, PUCK VLP-16 sensor integration, point cloud visualization, system configuration, and more. Get assistance from Mathieu Labbe's RTABMAP along with Clearpath and STEREO LAB resources. Explore tutorials on ROS integration and setting up on your robot.

E N D
Real Time 3D Mapping ZED Stereo Camera & JACKAL #SLAM #Computer_Vision #ROS #Python #C++ #Self_Driving #JACKAL #ZED # LIDAR MINYOUNG CHANG ANDY CHOI
HARDWARE SETUP PUCK VLP-16 LIDAR Sensor < Velodyne > ZED Stereo Camera < STEREO LABS > JACKAL < CLEARPATH >
SYSTEM SETUP /sensor_msgs/PointCloud2 LIDAR RVIZ /rgb/image_rect_color /depth/depth_registered RTABMAP /rtabmap/MapData ZED CAMERA CONTROLLER /odometry/filtered JACKAL /cmd_vel
SCREEN LAYOUT RVIZ LIDAR Point Cloud RTABMAP Point Cloud ZED Camera View JACKAL Real View
Reference Help from Mathieu Labbe (RTABMAP) CLEARPATH STEREO LAB http://wiki.ros.org/rtabmap_ros/Tutorials/HandHeldMapping https://github.com/introlab/rtabmap/wiki/Tutorials http://wiki.ros.org/rtabmap_ros/Tutorials/SetupOnYourRobot