Download
1 / 19
200 likes | 529 Views
Lectures 13 and 14 – Convolution. Measurements and effect of the system response function Mathematical definition of convolution Deconvolution and the convolution theorem Application to optics Convolution of two Gaussian functions Parseval’s Formula.

E N D
Lectures 13 and 14 – Convolution • Measurements and effect of the system response function • Mathematical definition of convolution • Deconvolution and the convolution theorem • Application to optics • Convolution of two Gaussian functions • Parseval’s Formula
Convolution is concerned with measurement and so is important in all branches of physics and astronomy • Any measurement system will tend to distort the quantity that we are attempting to determine. • We may be able to optimise the measurement system to minimise this distortion but it will always be present. • An understanding of convolution allows us, in theory, to extract the true value of the measured quantity from our experimental results.
Intensity Position Imagine we have to determine the intensity profile of light passing though an aperture in a screen using a photo-detector We move the detector smoothly over the aperture and at each position measure the light level recorded Only if the detector has zero width will the intensity profile measured equal the true one. Detector
Intensity Position Any real detector will have a non-zero width and this will distort the measured profile Detector
What we measure True function Quite often the measurement system has a Gaussian response
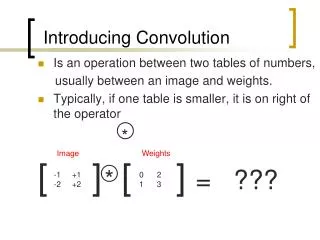
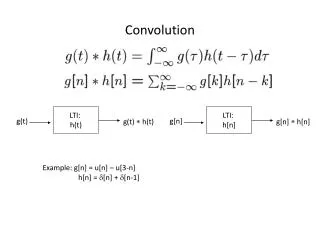
1. The signal function is given by g(x) and the system response function by f(x).2. Introduce a dummy variable u which enters the two functions as follows: f(u) and g(x-u).. Theory – the mathematical process by which two functions combine is called convolution
4. For a given value of x calculate the overlap between the two functions f(u) and g(x-u). This is achieved by keeping x constant and integrating the product of the two functions between at -∞ and +∞ with respect to the variable u.
5. This will give a new function c(x)which gives the ‘detected signal’ as a function of x and isthe convolution of the functions f and g. A convolution function is therefore defined by This process can only really be performed using computers.
Convolution when f(x) is a delta function Only contribution is when u=0 and hence g(x-u)=g(x) Convolution with a delta function gives the original function as expected
Example Sketch the convolution of two top-hat functions defined as f(x)=1 for –a<x<+a and zero otherwise and g(x)=1 for –b<x<+b and zero otherwise. Assume b>a.
Deconvolution How to we regain the true function from our experimental measurements? The convolution theorem tells us that if C(k) is the FT of the convoluted function then i.e. the FT of a convolution is the product of the FTs of the original functions. We can probably determine the response function of the measurement system by measuring a very sharp line, point source etc
We have . So taking the inverse transform, . We therefore find the FT of the observed signal, c(x), and of the resolution function, g(x), and use the result that that in order to find f(x).
Application to optics • Find the diffraction pattern produced by two slits, each of width a and a distance d apart by: • Finding the FT of the system • Simulating the system by the convolution of two delta functions and a top hat function and applying the convolution theorem.
Convolving two Gaussian functions If we showed that Hence for two different Gaussians
This is the just the FT of a single Gaussian characterised by. Hence using the convolution theorem Where
This is an important result: we have shown that the convolution of two Gaussians characterised by a and b is also a Gaussian and is characterised by . The value of is dominated by whichever is the smaller of a or b, and is always smaller then either of them. Since we found that the width of the Gaussian f(x) is (8/a)1/2, it is the widest Gaussian that dominates, and the convolution of two Gaussians is always wider than either of the two starting Gaussians.
Relating f(x) and F(k), F() and f(t), Parseval’s Formula Relates the total signals integrated over either set of variables
Conclusions • Measurements and effect of the system response function • Mathematical definition of convolution • Deconvolution and the convolution theorem • Application to optics • Convolution of two Gaussian functions • Parseval’s Formula