Download
1 / 23
230 likes | 331 Views
Computers on Cruise Control. Creating Adaptive Systems with Control Theory. Ricardo Portillo The University of Texas at El Paso raportil@miners.utep.edu. I’m going to talk about this. The Ultimate Goal: Performance. Performance Goals

E N D
Computers on Cruise Control Creating Adaptive Systems with Control Theory Ricardo Portillo The University of Texas at El Paso raportil@miners.utep.edu
I’m going to talk about this The Ultimate Goal: Performance Performance Goals • Response Time; Throughput; Execution Time; CPU Utilization How do we increase performance? • Tune the application to the system • Tune the system to the application
Tuning the System to the Application • Determine the resource needs of the application • Determine what system parameters affect the application’s performance • Tune these parameters for optimal management of the application’s resources
The Problem: Computer Complexity • Computers and applications are growing larger • Systems are becoming more heterogeneous • Workload characteristics change rapidly
The Solution: Automation Requirements • Monitor if performance goals are being met • Adapt when performance changes • Guarantee that an adaptation will produce the desired effect at the right time
Analogous Scenario The cruise control in you car Requirements: • Monitordesired velocity is being met • Adapt accelerator when velocity changes • Guarantee that changes produce the desired velocity Cruise Control is implemented with Control Theory!
What is Control Theory? Control Theory is: • A branch of engineering and mathematics • Deals with systems that change over time Main Goal: Given a desired output from a system, manipulate system inputs to constantly achieve that output. Fundamental Concept: The Feedback Loop
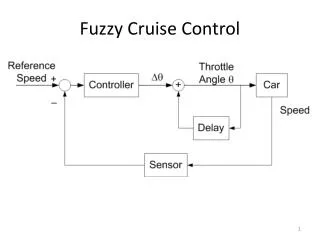
The Feedback Loop • Desired/Measured Output: Performance Metrics • Control Input: Tuning Parameters • Disturbance Input: Workload Changes Disturbance Input Desired Output Measured Output Control Input Target System Controller
What’s Inside the Controller? • A difference equation describing the next output as a function of the current input and output: y(k+1) = a*y(k) +b*u(k) y(k+1) = Desired Performance y(k) = Current Performance u(k) = Parameter value to meet desired performance • Can be rewritten as: u(k) = [y(k+1) - a*y(k)] / b
Desired Output y(k+1) Controller u(k) = [y(k+1) - a*y(k)] / b Control Input u(k) Measured Output y(k) The Controller • Receive • Current performance y(k) • Desired performance y(k+1) • Produce • Required parameter value u(k)
Difference Equation Flexibility • Want to look more than one time step in the past? Use an ARX model: y(k+1) = a1y(k)+…+any(k-n+1)+b1u(k)+…+bmu(k-m+1) • Want more than one performance goal satisfied? Produce a separate equation for each performance goal: CPU(k+1) = a11CPU(k) + a12MEM(k)+b11u1(k)+b12u2(k) MEM(k+1) = a21CPU(k) + a22MEM(k)+b21u1(k)+b22u2(k)
Getting your Difference Equation • Determine your system scope • Choose your representative workload • Run your experiments: • Constantly change your parameters while workload is running • Keep track of the current parameter and performance values and of subsequent performance values • Perform a scatter plot analysis on your data to estimate the coefficients of your equation • Evaluate your equation and repeat if necessary
Server Example 1) Determine your system scope: - Performance Output = CPU Utilization (range 0-1) - Control Input = Number of Users (NU) (range 0-N) - CPU(k+1) = a*CPU(k) + b*NU(k) 2) Choose your representative workload: Some server benchmark (e.g. TPC-C) 3) Run experiments 1) Start up server benchmark 2) Record CPU(k) 3) Change NU(k) 4) Goto step 2 until benchmark ends
Experimental Results After least-squares regression analysis: CPU(k+1) = -0.087*CPU(k)+0.19*NU(k)
Server Feedback Loop Desired Output CPU(k+1) -> (e.g. CPU = 0.6) Control Input NU(k) Controller NU(k) = [0.6 + 0.087*CPU(k)] / 0.19 Server System Measured Output CPU(k)
Problem: Difference Equation may only work for the next timestep k+1 • Assume coefficients a = b = 1 => y(k+1) = y(k) + u(k) => u(k) = y(k+1) – y(k) • Assume at k = 1; y(k) = 1 and you want goal y(k+1) = 2 u(1)= 2 – 1 = 1 -> u(1)=1 will produce y(k+1)=2 ->Performance goal met at k=2 • What’s the value of y(k) at k=3? y(3) = y(2) + u(2) = 2 + 1 = 3 -> Goal not met at k=3! • As k grows ? y(k+1) = y(k) + 1 Performance metric will keep increasing until u(k) is remodified
Example that at least converges • Assume coefficients a = b = 0.5 =>y(k+1) = 0.5*y(k) + 0.5*u(k) => u(k) = [y(k+1) – 0.5*y(k)] / 0.5 • Assume k = 1; y(k) = 1 and you want goal y(k+1) = 2 u(1) = [2 – .5*1]/.5 = 3 -> u(1) = 3 will produce y(k+1) = 2 -> Performance goal met at k=2 • What’s the value of y(k) at k=3? y(3) = .5*y(2) + .5*u(2) = .5*2 + .5*3 = 2.5 Goal not met at k=3! • But… as k grows ? y(k+1) = {2.75, 2.87, 2.93, 2.96, 2.98,…} Performance metric converges to 3 if left unchecked • A system is stable if performance converges when control input changes • A system is accurate if it converges to the right performance value
Criteria for a Good Controller • Stability: Measured performance must converge to some value when control inputs are modified • Accuracy: Measured performance must converge to the performance goal when control inputs are modified • Short Settling: Measured performance must converge to the performance goal quickly when control inputs are modified
How can We Evaluate the Criteria? • Convert your difference equation into a non-recursive function by applying a Z-transform • Apply Control Theory theorems to your non-recursive function to assess: • If your equation always converges (Stability) • To what value will it converge (Accuracy) • How fast will it converge (Settling Time)
Advanced Control Theory • Gain Scheduling: Allows different controllers to be swapped at runtime. • Self-Tuning Regulators:Enables the creation of difference equations at runtime using recursive least-squares analysis. • Fuzzy Controllers: Applies heuristics written in symbolic logic when modifying control inputs. Used when system characterization is qualitative instead of quantitative.
Control Theory in Practice • Data Networks: Much work in data flow control for TCP protocols • Multimedia: Work on maintaining real-time performance constraints on data streams • Server and DB Software: Most popular application of CT recently. DB2 contains CT based performance tuning • Autonomic Computing Initiative: Applies holistic CT approach to large systems. Started in 2001 by IBM.
Future of CT in Computing • Apply CT not only for regulatory performance control but also to performance optimization (e.g. with Fuzzy controllers) • Automate the design of controllers (e.g. with Self-tuning regulators) • Incorporate artificial intelligence to create and manage adaptive systems at runtime (e.g. with agent based computing)
In Summary • Systems are becoming too complex to manage without automation • Control Theory provides a systematic method of integrating adaptation into a system • Control Theory is well established and easily maps to computing environments