Download
1 / 38
420 likes | 549 Views
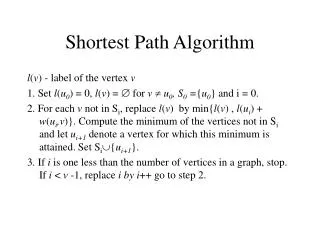
Shortest Path. HKOI 2006 March 11, 2006. Graph. Graph G = (V, E) Vertex/Node V Number |V| or simply V Degree deg[ v ],in-deg[ v ],out-deg[ v ] Edge E Number |E| or simply E Direction e = ( u , v ) or { u , v } Weight w e , w uv E ≤ V 2 i.e. deg[ v ] ≤ |V|.

E N D
Shortest Path HKOI 2006 March 11, 2006
Graph • Graph G = (V, E) • Vertex/Node V • Number |V| or simply V • Degree deg[v],in-deg[v],out-deg[v] • Edge E • Number |E| or simply E • Direction e = (u, v) or {u, v} • Weight we, wuv • E ≤ V2 i.e. deg[v] ≤ |V|
Breadth First Search • BFS needs O(V) queue and O(V) set for visiting state information and runs in O(V + E) time • BFS can find Shortest Path if Graph is NOTweighted
Order of Vertices • BFS works because a Queue ensures a specific Order • Define d[v] be the shortest path from s to v • At any time, vertices are classified into: • Black With known d[v] • Grey With some known path • White Not yet touched • The Grey vertex with smallest d[v] has potential to become Black
S 3 2 1 3 T 3 3 1
S T
S T
S T
S T
S T
S T
S T
S T
S T
S T
S T
Done? S T
Weighted Graph • Queue does not promise smallest d[v] anymore • Expanding path caused unnecessary searching of artificial vertices • We can simply pick the shortest real vertex • We need “Sorted Queue” which “dequeues” vertices in increasing order of d[v]. • It is called a “Priority Queue” and negation of d[v] is called the Priority of vertex v
0 3 2 1 3 3 3 1
0 3 3 2 1 3 3 2 3 1
Done? 0 3 3 2 1 3 5 3 2 3 1 3
Done? 0 3 3 2 1 3 4 3 2 3 1 3
0 3 3 2 1 3 4 3 2 3 1 3
Done? 0 3 3 2 1 3 4 3 2 3 1 3
Dijkstra’s Algorithm Lazy Deletion for-each v, d[v] ← ∞ d[s] ← 0 Q.Insert(s,d[s]) whilenot Q.Empty() do u = Q.ExtractMin() for-eachvwhere (u, v) in E if d[v] > d[u] + wuvthen d[v] = d[u] + wuv Q.Insert(v,d[v])
Dijkstra’s Algorithm for-each v, d[v] ← ∞ d[s] ← 0 Q.Insert(s,d[s]) whilenot Q.Empty() do u = Q.ExtractMin() for-eachvwhere (u, v) in E if d[v] > d[u] + wuvthen d[v] = d[u] + wuv Q.DecreaseKey(v,d[v])
Another idea • Consider the following code segment: For each edge (u, v) If d[v] > d[u] + wuv d[v] ← d[u] + wuv • Assume one of the shortest paths is (s, v1, v2, …, vk) • If d[vi] = its shortest path from s • After this loop, d[vi+1] = its shortest path from s • By MI, After k such loops, found shortest path from s to vk
Bellman-Ford Algorithm • All v1, v2, …,vk distinct for-each v, d[v] ← ∞ d[s] ← 0 Do V-1 times for-each (u, v) in E if d[v] > d[u] + wuv then d[v] ← d[u] + wuv • O(VE) • Support Negative-weight Edges
Negative Cycle • A negative cycle is a cycle whose sum of edge weights is negative • What happens of there are negative cycles in the graph? • Doesn’t matter if the negative cycle is not reachable from the source • If a negative cycle is reachable from the source, can we detect it? • Answer: one more round of relaxations
All-pairs Shortest Path • Sometimes we want to find the distances between any pair of vertices • Intermediate vertices may shorten the distance between two vertices • Label the vertices as v1, v2, … , vn • Let Vk-path be a path which uses only v1, v2, … , vk as intermediate vertices • A s-t-V1-path must either be • a s-t-V0-path, or • concatenation of a s-v1-V0-path and v1-t-V0-path • A s-t-V2-path must either be • a s-t-V1-path, or • concatenation of a s-v2-V1-path and v2-t-V1-path • By MI …
Recurrence Relation • A s-t-Vk-path must either be • a s-t-Vk-1-path, or • concatenation of a s-vk-Vk-1-path and vk-t-Vk-1-path • dij(k):=length of the shortest vi-vj-Vk-path • dij(k) = wij if k=0 min(dij(k-1), dik(k-1) + dkj(k-1) ) if k>=1
Warshall’s Algorithm dij(k) = wij if k=0 min(dij(k-1), dik(k-1) + dkj(k-1) ) if k>=1 d ← ∞ for-each (u, v) in E d[u][v] ← wuv for-eachk in V e ← d for-eachiin V for-eachjin V if e[i][j] > d[i][k] + d[k][j] e[i][j] ← d[i][k] + d[k][j] d ← e • Time Complexity: O(V3)
Warshall-Floyd Algorithm d ← ∞ for-each (u, v) in E d[u][v] ← wuv for-eachk in V for-eachiin V for-eachjin V if d[i][j] > d[i][k] + d[k][j] d[i][j] ← d[i][k] + d[k][j] Time Complexity: O(V3)
Summary • Dijkstra’s Algorithm • Bellman-Ford Algorithm • Warshall-Floyd Algorithm
Construction of Shortest Path • If the whole shortest path from source vertex s to any vertex v is stored during computation, time and space complexities of the algorithms will increase • For single-source shortest path algorithms, only the parent vertex p[v] of a vertex v is stored • Shortest path may be constructed based on p[v] • A shortest path tree Gp is formed with root s • How to contruct shortest paths in Floyd-Warshall algorithm?