Download
1 / 12
120 likes | 326 Views
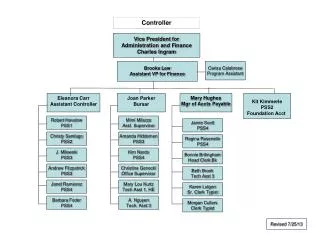
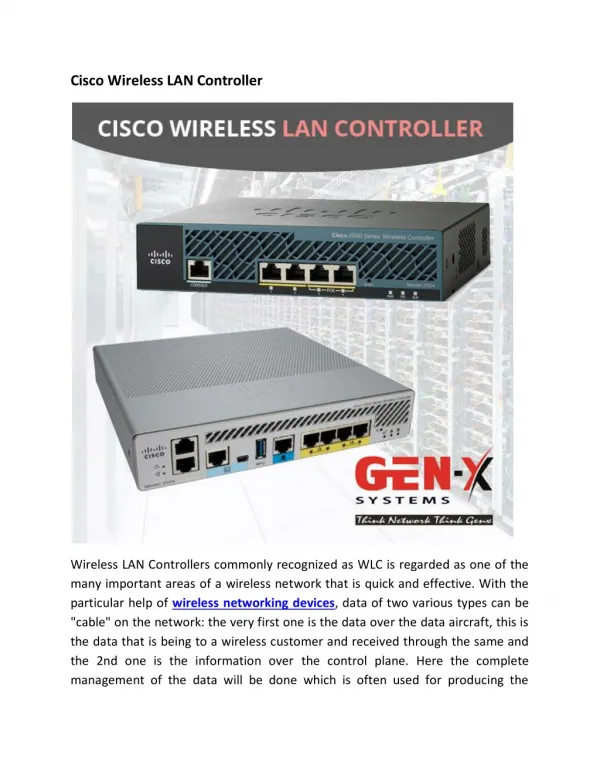
Wireless Controller. Steven Mays Faculty Advisor: Frank Hludik Start Date: 10/27/09 End Date: May 2010. Forward/Backward Motion

E N D
Wireless Controller Steven Mays Faculty Advisor: Frank Hludik Start Date: 10/27/09 End Date: May 2010
Forward/Backward Motion The vehicle contains two DC motors attached to the rear wheels. I will need to build two h-bridges in order to control these motors, making them turn one way or the other depending on the inputs.
SteeringThe jeep has kingpin steering which uses a pivot point to move the axle right or left. To control this motion I will use another H-bridge to drive a motor inside a power screw driver. The screwdriver will drive a screw into and out of a nut forcing the axle to pivot back and forth.
Distance MeasuringFor measuring the distance traveled, I will cut equally spaced holes in a disc of a known radius. As the disc turns with the wheels of the jeep, an LED will be shined on a phototransistor on opposite sides of the disc. A counter chip will then be used to count how many holes it passes by to determine the distance the jeep has travelled. One revolution will make the distance travelled equal to the circumference of the disc (2*pi*r)
Collision DetectionIn order for the jeep to avoid collisions while it is moving, I will include a Passive Infra-red Sensor which can detect changes in radiation from 20 feet away. This device is made to adjust to slow ordinary changes in the environment, while reacting to sudden changes such as motion. Motion is detected by a high output signal from the sensor, in which case the jeep should stop moving to avoid a collision.
Testing • Testing will play major role in completing this project on time and must be done often. Since I am working on this project alone it should be easier to test and rebuild certain parts without having to worry about compatibility with other parts being built concurrently. I will unit test each component for functionality and compatibility with the computer and the vehicle. I will be performing integration testing (software/hardware) between all the components to ensure the required functionality, reliability, and efficiency. Finally, I will perform a final system test to ensure all components work and behave as expected.