Download
1 / 40
520 likes | 824 Views
Chapter 10 Learning Sets Of Rules. Content. Introduction Sequential Covering Algorithm Learning First-Order Rules (FOIL Algorithm) Induction As Inverted Deduction Inverting Resolution. Introduction. GOAL: Learning a target function as a set of IF-THEN rules

E N D
Content • Introduction • Sequential Covering Algorithm • Learning First-Order Rules (FOIL Algorithm) • Induction As Inverted Deduction • Inverting Resolution
Introduction • GOAL: Learning a target function as a set of IF-THEN rules • BEFORE: Learning with decision trees • Learning the decision tree • Translate the tree into a set of IF-THEN rules (for each leaf one rule) • OTHER POSSIBILITY: Learning with genetic algorithms • Each set of rule is coded as a bitvector • Several genetic operators are used on the hypothesis space • TODAY AND HERE: • First: Learning rules in propositional form • Second: Learning rules in first-order form (Horn clauses which include variables) • Sequential search for rules, one after the other
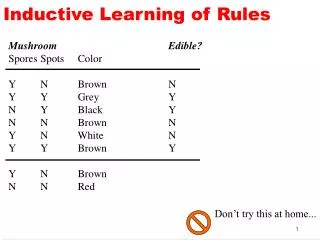
Introduction IF (Outlook = Sunny) ∧ (Humidity = High) THEN PlayTennis = No IF (Outlook = Sunny) ∧ (Humidity = Normal) THEN PlayTennis = Yes
Introduction • An example of first-order rule sets target concept: Ancestor • IF Parent(x,y) THEN Ancestor(x,y) • IF Parent(x,y)∧ Parent(y,z) THEN Ancestor(x,z) • The content of this chapter Learning algorithms capable of learing such rules , given sets of training examples
Content • Introduction • Sequential Covering Algorithm • Learning First-Order Rules (FOIL Algorithm) • Induction As Inverted Deduction • Inverting Resolution
Sequential Covering Algorithm • Goal of such an algorithm:Learning a disjunctive set of rules, which defines a preferably good classification of the training data • Principle:Learning rule sets based on the strategy of learning one rule, removing the examples it covers, then iterating this process. • Requirement for the Learn-One-Rule method: • As Input it accepts a set of positive and negative training examples • As Output it delivers a single rule that covers many of the positive examples and maybe a few of the negative examples • Required: The output rule has a high accuracy but not necessarily a high coverage
Sequential Covering Algorithm • Procedure: • Learning set of rules invokes the Learn-One-Rule method on all of the available training examples • Remove every positive example covered by the rule • Eventually short the final set of the rules: more accurate rules can be considered first • Greedy search: • It is not guaranteed to find the smallest or best set of rules that covers the training example.
Sequential Covering Algorithm SequentialCovering( target_attribute, attributes, examples, threshold ) learned_rules { } rule LearnOneRule( target_attribute, attributes, examples ) while (Performance( rule, examples ) > threshold ) do learned_rules learned_rules + rule examples examples - { examples correctly classified by rule } rule LearnOneRule( target_attribute, attributes, examples ) learned_rules sort learned_rules according to Performance over examples return learned_rules
General to Specific Beam Search The CN2-Algorithm LearnOneRule (target_attribute, attributes, examples, k ) Initialise best_hypothesis to the most general hypothesis Ø Initialise candidate_hypotheses to the set { best_hypothesis } while ( candidate_hypothesis is not empty ) do 1. Generate the next more-specific candidate_hypothesis 2. Update best_hypothesis 3. Update candidate_hypothesis return a rule of the form “IFbest_hypothesisTHENprediction“ where prediction is the most frequent value of target_attribute among those examples that match best_hypothesis. Performance( h, examples, target_attribute ) h_examples the subset of examples that match h return -Entropy( h_examples ), where Entropy is with respect to target_attribute
General to Specific Beam Search • Generate the next more specific candidate_hypothesis all_constraints set of all constraints (a = v), where aÎattributes and v is a value of an occuring in the current set of examples new_candidate_hypothesis for each h in candidate_hypotheses, for each c in all_constraints create a specialisation of h by adding the constraint c Remove from new_candidate_hypothesis any hypotheses which are duplicate, inconsistent or not maximally specific • Update best_hypothesis for all h in new_candidate_hypothesisdo if statistically significant when tested on examples Performance( h, examples, target_attribute ) > Performance( best_hypothesis, examples, target_attribute ) ) thenbest_hypothesis h
General to Specific Beam Search • Update the candidate-hypothesis candidate_hypothesis the k best members of new_candidate_hypothesis, according to Performance function • Performance function guides the search in the Learn-One -Rule • s: the current set of training examples • c: the number of possible values of the target attribute • : part of the examples, which are classified with the ith. value
Learning Rule Sets: Summary • Key dimension in the design of the rule learning algorithm • Here sequential covering: learn one rule, remove the positive examples covered, iterate on the remaining examples • ID3 simultaneous covering • Which one should be preferred? • Key difference: choice at the most primitive step in the searchID3: chooses among attributes by comparing the partitions of the data they generatedCN2: chooses among attribute-value pairs by comparing the subsets of data they cover • Number of choices: learn n rules each containing k attribute-value tests in their precondition CN2: n*k primitive search stepsID3: fewer independent search steps • If the data is plentiful, then it may support the larger number of independent decisons • If the data is scarce, the sharing of decisions regarding preconditions of different rules may be more effective
Learning Rule Sets: Summary • CN2: general-to-specific (cf. Find-S specific-to-general):the direction of the search in LEARN-ONE-RULE. • Advantage: there is a single maximally general hypothesis from which to begin the search <=> there are many specific ones • GOLEM: choosing several positive examples at random to initialise and to guide the search. The best hypothesis obtained through multiple random choices is the selected one • CN2: generate then test • Find-S, CANDIDATE-ELIMINATION are example-driven • Advantage of the generate and test approach: each choice in the search is based on the hypothesis performance over many examples, the impact of noisy data is minimized
Content • Introduction • Sequential Covering Algorithm • Learning First-Order Rules (FOIL Algorithm) • Induction As Inverted Deduction • Inverting Resolution
Learning First-Order Rules • Why do that ? Can learn sets of rules such as • IF Parent(x,y) THEN Ancestor(x,y) • IF Parent(x,y)∧Ancestor(y,z) THEN Ancestor(x,z)
Learning First-Order Rules • Terminology • Term : Mary , x , age(Mary) , age(x) • Literal : Female(Mary), ﹁Female(x) Greater_than(age(Mary) ,20) • Clause : M1∨…∨Mn • Horn Clause: H←(L1∧…∧Ln) • Substitution : {x/3,y/z} • Unifying substitution: = FOIL Algorithm (Learning Sets of First-Order Rules)
Cover all positive examples Avoid all negative examples
Learning First-Order Rules • Analysis of FOIL • Outer Loop Specific-to-general • Inner Loop general-to-specific • Difference between FOIL and Sequential- covering and Learn-one-rule • generate candidate specializations of the rule • FOIL_Gain
Learning First-Order Rules • Candidate Specializations in FOIL(Ln+1)
Learning First-Order Rules • Example Target Predicate : GrandDaughter(x,y) Other Predicate: Father , Female Rule : GrandDaughter(x,y) Candidate Literal: Equal(x,y) ,Female(x),Female(y),Father(x,y),Father(y,x), Father(x,z),Father(z,x), Father(y,z), Father(z,y) + negative Literals GrandDaugther(x,y) Father(y,z) GrandDaughter(x,y) Father(y,z) ∧Father(z,x) ∧Female(y)
Learning First-Order Rules • Information Gain in FOIL • Assertions of training data GrandDaughter(Victor,Sharon) Father(Sharon,Bob) Father(Tom,Bob) Female(Sharon) Father(Bob,Victor) • Rule : GrandDaughter(x,y) • Variable binding (16): {x/Bob , y/Sharon} • Positive example binding: {x/Victor , y/Sharon} • Negative example binding (15): {x/Bob,y/Tom} ……
Learning First-Order Rules • Information Gain in FOIL L the candidate literal to add to rule R p0 number of positive bindings of R n0 number of negative bindings of R p1 number of positive bindings of R+L n1 number of negative bindings of R+L t the number of positive bindings of R also covered by R+L
Learning First-Order Rules • Learning Recursive Rule Sets Target Predicate can be the candidate literals • IF Parent(x,y) THEN Ancestor(x,y) • IF Parent(x,y)∧Ancestor(y,z) THEN Ancestor(x,z)
Learning First-Order Rules • Learning Recursive Rule Sets Target Predicate can be the candidate literals • IF Parent(x,y) THEN Ancestor(x,y) • IF Parent(x,y)∧Ancestor(y,z) THEN Ancestor(x,z)
Content • Introduction • Sequential Covering Algorithm • Learning First-Order Rules (FOIL Algorithm) • Induction As Inverted Deduction • Inverting Resolution
Induction As Inverted Deduction • Machine Learning Building theories that explain the observed data ( D <xi , f(xi)> ; B ; h ) • Induction is finding h such that entail
Induction As Inverted Deduction • Example target concept : Child(u , v)
Induction As Inverted Deduction • What we will be interested is designing inverse entailment operators
Content • Introduction • Sequential Covering Algorithm • Learning First-Order Rules (FOIL Algorithm) • Induction As Inverted Deduction • Inverting Resolution
Inverting Resolution(逆规约) C1 C2 C Resolution operator construct C : ( C1 ∧ C2 C )
Inverting Resolution • First-order resolution Resolution operator (first-order):
Inverting Resolution • Inverting First order resolution Inverse resolution (first-order )
C C1 L1 Inverting Resolution • Example target predicate : GrandChild(y,x) D = { GrandChild(Bob,Shannon) } B = {Father(Shannon,Tom) , Father(Tom,Bob)}
Inverting Resolution C1 C2 C
Summary • Sequential covering algorithm • Propositional form • first-order (FOIL algorithm) • A second approach to learning first-order rules -- Inverting Resolution