Download
1 / 9
90 likes | 233 Views
DAQ report. Magali Gruwé CERN EP/ATT SCT/Pixel RODDAQ workshop in London July 18 th 2002. Reminder. Online DAQ: encompasses all Software for Configuration Control of the T/DAQ system Monitoring also the “glue” that should keep the ATLAS DAQ going DataFlow:

E N D
DAQ report Magali Gruwé CERN EP/ATT SCT/Pixel RODDAQ workshop in London July 18th 2002
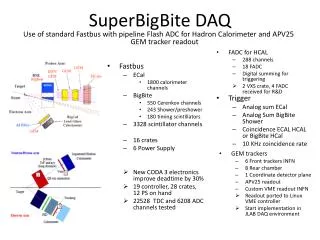
Reminder • Online DAQ: • encompasses all Software for • Configuration • Control of the T/DAQ system • Monitoring • also the “glue” that should keep the ATLAS DAQ going • DataFlow: • System responsible for moving data from the detector Read Out Drivers (RODs) to mass storage, through two event selection stages. • System subdivision: • Read Out Subsystem (ROS) • Data Collection (DC) • High Level Trigger (HLT) dataflow SCT/Pixel RODDAQ workshop in London– July 18th 2002 Magali Gruwé CERN EP/ATT
Online DAQ: Current release • Release 0.0.17 available since april 2002 • 12 patches to be applied • Main changes with respect to 0.0.16: • new package: histogram distribution • Transport of histograms • Independent of histogramming package • A first implementation • new features in DDC (connection Online-DCS) • transfer both DAQ-to-DCS and DCS-to-DAQ data • some message transfer • new package: Online DAQ training • improvements in existing packages • configuration database: schema and GUI • IGUI: user specific IGUI panels • OBK: new OBK database schema • etc... SCT/Pixel RODDAQ workshop in London– July 18th 2002 Magali Gruwé CERN EP/ATT
Online DAQ: Next release • Around next month • Will be first CMT relase (0.0.17 is SRT release) • release 1.0.0 (?) numbering to be confirmed • Purpose: • solve patches (currently 12 patches in 0.0.17) • check procedure for CMT release • include histo-display package • fix some problems in database package • which cannot be solved by patches • seen in DIG training SCT/Pixel RODDAQ workshop in London– July 18th 2002 Magali Gruwé CERN EP/ATT
ROS: Status • Existing Prototypes since DAQ/EF-1: • Subsystem composed of identical modular units. • Designed according to ATLAS requirements. • Implemented with today’s technologies. • Adopted in ATLAS test beams (Tile, Muon, Pixel). • A complete program of system measurements (Q3 2001-Q1 2002): • Evaluate the first design. • Analyse technical solutions adopted in the various implementations. • In Q1 2002 a complete redesign of the ROS was carried out. SCT/Pixel RODDAQ workshop in London– July 18th 2002 Magali Gruwé CERN EP/ATT
ROS: Current • Previous implementation of the ROS used and maintained during the 2002 test beams. • Based on request from users the ROS is now able to receive data both over SLink and over TCP/IP. • Aspects of new ROS (Local Controller) already introduced. • TileCal test beam run (June 2002): • Users reported very good stability and performance of the system. • Muon test beam run (August 2002): • Use of 2 modular units. • Use of ethernet ROLs. SCT/Pixel RODDAQ workshop in London– July 18th 2002 Magali Gruwé CERN EP/ATT
Scalability tests • First test last year • some limitations found • This year: • increase of the system size • successful test with 200 local controllers (final system should support o(1000) local controllers) • RC transitions in less than 0.5 s • limits of current system visible SCT/Pixel RODDAQ workshop in London– July 18th 2002 Magali Gruwé CERN EP/ATT
Integration tests • Phase 2A: • ROS and Data Collection and Online Software • First experience of the Online Software as “glue” between the subsystems • Phase 2B: • Ongoing • New: DCS integration by DDC component • New version with extended feature set successfully tested SCT/Pixel RODDAQ workshop in London– July 18th 2002 Magali Gruwé CERN EP/ATT
Later on • Analyse results of scalability test (with 200 local controllers) • Around october 2002: • New Online DAQ release solving some of the problems related to scalability test SCT/Pixel RODDAQ workshop in London– July 18th 2002 Magali Gruwé CERN EP/ATT