Download
1 / 21
210 likes | 372 Views
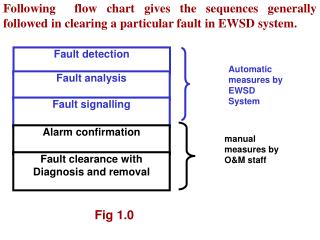
Observers Data Only Fault Detection. Bo Wahlberg Automatic Control Lab & ACCESS KTH, SWEDEN André C. Bittencourt Department of Automatic Control UFSC, Brazil & Linköping University, SWEDEN. MB filter. Sensor. -. ???. Integrated Sensor. -. Problem Description.

E N D
Observers Data Only Fault Detection Bo Wahlberg Automatic Control Lab & ACCESS KTH, SWEDEN André C. Bittencourt Department of Automatic Control UFSC, Brazil & Linköping University, SWEDEN
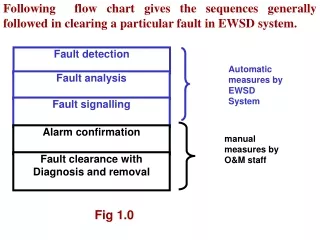
MB filter Sensor - ??? Integrated Sensor - Problem Description Residual based fault detection • Difference between a sensor output and a corresponding model-based prediction Usual case • Raw measurements • available Integrated sensors • No access to the raw • measurements
Motivational Applications Navigation/Localization systems • i.e. GPS, odometry, SLAM
Residual Generation using Observers Estimates ONLY Simplification: The sensors are integrated with standard observers/Kalman filters Faults are now mixed through the observer The sensor structures, i.e. the observer gains, will affect the fault influence to the estimates
Different Approaches 1.Try to reconstruct the output as • - Sensitive to errors • - Requires a reliable observer model • - Redundant solutions 2. Assume there are at least 2 observers (sensors) • Model is not used
Idea! 3.Augment sensor states • Use the augmented state model to design an overall observer to generate the residuals Questions • Are faults still observable? • What if is unknown? • How to compare the performance?
Fault Observability • Suppose and augment the fault to the states (e.g. Törnqvist, 2006) • Analyze the observability of the augmented system
Fault Observability is OK, IF • Original pair is observable • is full column rank Same conditions as if the raw measurements were available (we can access the same information)
Unknown Sensor Structure The internal sensor structure • is abstracted, with some simplifications, to The simplified model is then used to generate residuals • , the artificial measurement noise can be used to adjust for jitter, lost samples, etc
Performance comparison Analyze the residual-fault transfer functions (fault sensitivity) for the different methods Some indications of improvements using the overall observer • i.e. Steady state analyzes
Robot Example – where am I? Localization is crucial in autonomous systems Typical situations • Wheel slippages • Skidding • Wall grasping • Pushed away • Collision
Two Localization Providers Odometry • Integration of velocity meas • Based on the linear displacement caused by wheel rotations • Reliability < 15m (acc errors) Laser Scan Matching • Integration of relative displacement measurements • Hough transform (heading) + Iterative Closest Point (ICP)
Residuals Used Aug states EKF • Simple approach • EKF using the augmented state matrix model
Behavior – No faults • Odometry bias quickly (badly calibrated tires) • Will increase the amount of false alarms • Model disturbances affects considerably more
Behavior – Faults t+4 t t+1 t+3 t+2 t+4 t t+1 t+2 t+3 • Succesfull detection in many cases
Preliminary Results Basic idea: • Extended system (system + sensor). • Design an overall observer to generate residuals • Do standard fault detection • Fault observability conditions have been derived • Evaluation on a mobile robot – real data Remaining open questions: • More thorough performance analysis needed • Use of more complex sensor models • Methods to support observer design to residual gen
Unknown Sensor Structure Two approximations 1. 2. Then, use the simplified model to tune, for example, a Kalman filter , the artificial measurement noise can be used to adjust for jitter, lost samples, etc
Scan matching • Estimate the transform relating two scans • is the hardest to estimate • is estimated through spectrum correlation in the Hough domain [Censi05] • Rotations are phase shifts in the HD • ICP solves the translation estimation
Robot Models • Odometry model based on the relation between wheel rotation to linear displacement • Model valid for differential drive robot • Simple kinematics model • Robot as a rigid-body • Moving in a plane
Detection - rotation and are affect with a transient behavior Input faults Effects in are greater than in because the estimate has a much smaller variance than is a directly measured quantity is a direvative estimate of the pose t+4 t t+1 t+3 t+2 t+4 t t+1 t+3 t+2