Download
1 / 17
180 likes | 311 Views
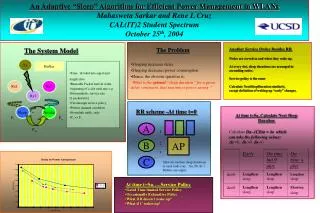
An Efficient Digital Sliding Controller for Adaptive Power-Supply Regulation. Jaeha Kim and Mark Horowitz. Adaptive Power-Supply Regulation. Operating at lower frequency saves power, but not energy. a Power ~ V 2 f, Energy ~ V 2 .

E N D
An Efficient Digital Sliding Controller for Adaptive Power-Supply Regulation Jaeha Kim and Mark Horowitz
Adaptive Power-Supply Regulation • Operating at lower frequency saves power, but not energy. a Power ~ V2f, Energy ~ V2. • Adaptive power-supply regulation saves both by lowering voltage, too. • Applications: mPs, DSPs, and high-speed I/Os. J. Kim and M. Horowitz
Adaptive Power-Supply Regulator J. Kim and M. Horowitz
The Controller • Switching power supplies regulate voltage. a Analog controllers • Adaptive power-supplies regulate delay. a Digital controllers • This work presents a simpler digital controller using sliding control. J. Kim and M. Horowitz
Outline • Introduction • Sliding Control • Digital Implementation • Measurement Results • Conclusions J. Kim and M. Horowitz
Phase Portraits J. Kim and M. Horowitz
Sliding Control (1) • Control law: dV/dt + (V-Vref)/t = 0. • Effectively a first-order system with time constant t. J. Kim and M. Horowitz
Sliding Control (2) J. Kim and M. Horowitz
Digital Sliding Controller (1) Digital controller needs to estimate df/dt in: df/dt + (f-fref)/t = 0. • Approach 1: measure the change in f for a fixed time duration. • Approach 2: measure the elapsed time Dt for a fixed change in f, Df. afits the digital implementation better J. Kim and M. Horowitz
Digital Sliding Controller (2) • The original sliding control law was: df/dt + (f-fref)/t =? 0. • Use df/dt = Df/Dt, and rearrange: Dt =? -tDf/(f-fref) = -Nt/(f-fref). • Measure Dt using a counter clocked at |f-fref|, i.e. Dt = N/|f-fref|, then: N =? Nt. J. Kim and M. Horowitz
Digital Sliding Controller (3) J. Kim and M. Horowitz
Sensor Implementation J. Kim and M. Horowitz
Chip Prototype • 0.25-mm CMOS • Controller area: 0.7x0.5mm2. • On-chip power transistors: 4.4mm(P), 2.2mm(N). • Off-chip components: 15.2mH (L), 21.6mF (C). J. Kim and M. Horowitz
Measurement Results (1) J. Kim and M. Horowitz
Measurement Results (2) • Step change in fref • Step change in load current 150MHz 370MHz 150MHz 0mA 80mA 0mA J. Kim and M. Horowitz
Conclusions • Sliding control is robust and fast in transients. • The reformulated control law enables simple digital implementation. • Scalability of the controller power keeps the efficiency high under low loads. • A new sensor based on a ring-oscillator further reduces the area. J. Kim and M. Horowitz
Acknowledgements • David Su, Sotirios Limotyrakis, & Wonjoon Choi • Dean Liu, Stefanos Sidiropoulos, Gu-Yeon Wei, Ken Mai, & Dan Weinlader. • Behzad Razavi & Brian Brandt • National Semiconductor • Sookyung Kim J. Kim and M. Horowitz