Download
1 / 10
100 likes | 252 Views
5. 2. 1. 6. 3. 4. 13. 8. 14. 9. 12. 7. 16. 11. 15. 10. 19. 18. 20. 21. 17. 22. 27. 31. 24. 32. 25. 28. 36. 23. 29. 33. 25. 34. 26. 30. Rain, . Sprinkler, . Wet Grass, . T. F. 0.99. 0.01. T. T. 0.4. 0.54. 0.46. F. 0.6. F. Prior Knowledge:.

E N D
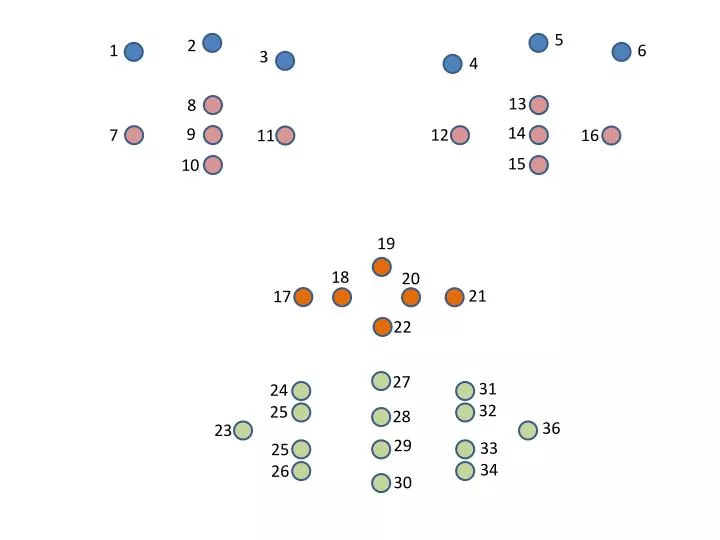
5 2 1 6 3 4 13 8 14 9 12 7 16 11 15 10 19 18 20 21 17 22 27 31 24 32 25 28 36 23 29 33 25 34 26 30
Rain, Sprinkler, Wet Grass, T F 0.99 0.01 T T 0.4 0.54 0.46 F 0.6 F
Prior Knowledge: Decision: Happy Sad Surprise Disgust Fear Anger Exemplar: Observation:
Total Training Space Distance Ordering k 1 k 1 k 1 k 1 k 1 k 1 Expression Label 1 k Exemplar Layer Node Selection Goal: Findsuch that
Angry Surprise Disgust Happy Sad Fear Disciplined Convex Optimization Newton Method
Motion Audio Visual Social Interaction Assistant Actuator Suite Sensor Suite User Input Audio Haptic
Secure / Erasable Insecure Machine Learning towards Identification/ Verification Proprietary Transformation Transformed Biometric Data Biometric Data User Specific Key Encoder Transformation Parameters
Frontalis Levator Palpebrae Superioris Orbicularis Oculi Zygomaticus Minor Zygomaticus Major Orbicularis Oris Depressor Labii Inferioris Mentalis