Download
1 / 26
260 likes | 370 Views
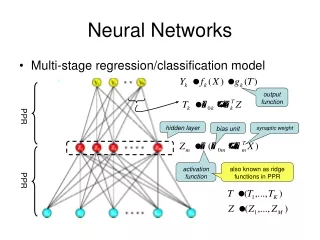
Genetic Regulatory Networks Applied to Neural Networks. Bryan Adams MIT Computer Science and Artificial Intelligence Laboratory. Outline. Motivation and Related Work System Overview and Results Conclusions. Motivation and Related Work System Overview and Results Conclusions.

E N D
Genetic Regulatory Networks Applied to Neural Networks Bryan Adams MIT Computer Science and Artificial Intelligence Laboratory
Outline • Motivation and Related Work • System Overview and Results • Conclusions • Motivation and Related Work • System Overview and Results • Conclusions Research Qualifying Exam
Motivation: June, 2004 Research Qualifying Exam
Motivation • Robot controllers … • Robust • Adaptive • Complex behaviors • Borrow from biology • Evolutionary Artificial Neural Networks (ANNs) • Genetic Regulatory Networks (GRNs) Research Qualifying Exam
Motivation Two similar robots (or cars) … Slightly different morphologies Research Qualifying Exam
Stanley, Miikkulainen • NEAT • Husbands • GasNets • Zhou, Shen • Bugs Related Work: Evolutionary ANNs Research Qualifying Exam
Kumar • GRN controller • Peter Eggenberger • Neural Retina • Josh Bongard • Artificial Ontogeny Related Work: GRNs Research Qualifying Exam
Outline • Motivation and Related Work • System Overview and Results • Conclusions • Motivation and Related Work • System Overview and Results • Conclusions Research Qualifying Exam
System Overview: NEAT • Direct, complete genetic encoding • “Innovation numbers” • Very clever genetic operators • Speciation during evolution • Theoretically minimal networks Research Qualifying Exam
Pcnt Prod R Prod System Overview: GRN • Repressive control • Constitutively active • Repressor shuts off = Pcnt – (R Famt) ; >= 0 Research Qualifying Exam
0 Prod A Prod System Overview: GRN • Activator control • Constitutively silent • Activator causes expression = A Famt ; <= Pcnt Research Qualifying Exam
System Overview: Signals • Decay according to first-order kinetics t=1 = k t=0 • For n signals, half-lives are evenly spaced Research Qualifying Exam
Environment System Overview: NEAT-GRN + Research Qualifying Exam
System Overview: 36 NEAT Parameters int n_links_avoid_chaining = 15; int num_tries_insert_hid = 30; float max_new_weight = 2.50f; float max_big_weight = 10.0f; float max_w_change = 2.50f; bool allow_recurrent_links = false; int num_tries_insert_link = 30; float prob_reenable_during_xover = 0.25f; float max_weight = 12.00f; float min_weight =-12.00f; float p_mutate_weights = 0.90f; int min_size_age_prot = 10; float old_links_frac = 0.20f; float old_links_mul = 1.20f; float p_severe_mut = 0.50f; float p_severe_change = 0.70f; float p_severe_new = 0.20f; float p_normal_change = 0.50f; float p_normal_new = 0.10f; int min_size_for_elite = 5; int max_elderly_amnesty = 15; float failure_to_improve_penalty = 0.01f; float good_parent_frac = 0.20f; float p_mutate_only = 0.25f; float p_inters_xover = 0.001f; float upper_spec_frac = 0.22f; float lower_spec_frac = 0.18f; float dyn_spec_increment = 0.30f; float c1 = 1.0f; float c2 = 1.0f; float c3 = 0.4f; float delta_t = 3.0f; float p_add_node = 0.03f; float p_add_link = 0.30f; float p_add_node = 0.001f; float p_add_link = 0.05f; Research Qualifying Exam
System Overview: 30 GRN Parameters int n_signals = 4; float max_half_life = 20; float min_half_life = 2; int production_steps = 50; float signal_input_multiplier = 0.01f; float lethal_fraction = 0.10f; float p_take_both= 0.25f; float p_add_copy_link = 0.15f; float max_num_copies = 3; float p_mutate_regl = 0.75f; float p_add_regl = 0.00f; float p_regl_severe_mut = 0.50f; float p_regl_normal_chg = 0.50f; float p_regl_normal_new = 0.10f; float p_regl_severe_chg = 0.70f; float p_regl_severe_new = 0.20f; float c4 = 0.1f; float p_no_prod = 0.50f; float p_no_ra = 0.00f; float p_neg_ctrl = 0.50f; float famt_max_val = 0.30f; float famt_max_incr = 0.02f; float pcnt_max_val = 0.30f; float pcnt_max_incr = 0.02f; float p_change_rg = 0.00f; float p_change_ra = 0.02f; float p_change_pr = 0.04f; float p_change_pc = 0.65f; float p_change_fa = 1.00f; float expression_amt = 0.00001f; Research Qualifying Exam
Results: NEAT and XOR / NXOR Results averaged over 200 runs; 100% solution success Research Qualifying Exam
Results: NEAT-GRN XOR / NXOR Results averaged over 200 runs; 100% solution success Research Qualifying Exam
Results: NEAT-GRN Number of Signals Results averaged over 200 runs; Same GRN parameters Research Qualifying Exam
Results: NEAT-GRN Number of Signals Results averaged over 200 runs; Same GRN parameters Research Qualifying Exam
Results: NEAT-GRN XOR & NXOR Results averaged over 100 runs 35% solution success (max 250 gen) Research Qualifying Exam
Env1 Env0 Results: XOR & NXOR network bias_t [000] 0.000 inpt_t [001] 0.000 inpt_t [002] 0.000 outp_t [003] 1.000 hidn_t [004] 0.500 r{ + 1/0.029 0.054 } hidn_t [005] 0.500 r{ - 0/0.022 0.043 } hidn_t [007] 0.250 r{ - 0/0.030 0.049 } hidn_t [011] 0.125 r{ + 2/0.046 0.017 } hidn_t [013] 0.625 r{ - 1/0.012 0.096 } hidn_t [019] 0.313 r{ + 3/0.013 0.048 } link_t [000] [e] 0 3 5.88 r{ - 2/0.028 0.039 } link_t [001] [e] 2 3 -3.90 r{ - 2/0.007 0.037 } link_t [001] [e] 2 3 8.10 r{ + 0/0.021 0.005 } link_t [002] [e] 1 3 -6.04 r{ + 3/0.007 0.008 } link_t [003] [e] 2 4 2.70 r{ - 2/0.026 0.036 } link_t [004] [e] 4 3 11.65 r{ - 0/0.035 0.065 } link_t [005] [e] 1 5 -9.92 r{ + 1/0.007 0.040 } link_t [005] [e] 1 5 -10.55 r{ + 2/0.102 0.024 } link_t [005] [e] 1 5 -6.01 r{ + 1/0.021 0.014 } link_t [006] [e] 5 3 -8.85 r{ - 3/0.081 0.010 } link_t [007] [e] 1 4 6.69 r{ - 1/0.049 0.050 } link_t [008] [e] 0 4 -1.19 r{ - 2/0.088 0.005 } link_t [008] [e] 0 4 8.59 r{ - 2/0.045 0.019 } link_t [008] [e] 0 4 -4.49 r{ - 0/0.012 0.034 } link_t [009] [e] 0 5 1.68 r{ - 3/0.051 0.051 } link_t [010] [e] 2 5 3.76 r{ - 0/0.050 0.008 } link_t [010] [e] 2 5 3.41 r{ + 0/0.071 0.026 } link_t [010] [e] 2 5 -10.39 r{ - 3/0.054 0.067 } link_t [013] [e] 1 7 1.17 r{ + 3/0.097 0.022 } link_t [014] [e] 7 5 -12.00 r{ - 3/0.004 0.042 } link_t [017] [e] 2 7 7.27 r{ + 0/0.046 0.045 } link_t [018] [e] 7 4 -1.33 r{ - 2/0.023 0.040 } link_t [021] [e] 7 3 5.15 r{ - 2/0.006 0.059 } link_t [021] [e] 7 3 2.48 r{ + 0/0.031 0.030 } link_t [022] [e] 0 7 -3.24 r{ - 1/0.026 0.064 } link_t [022] [e] 0 7 7.14 r{ + 3/0.050 0.070 } link_t [025] [e] 1 11 7.35 r{ + 3/0.028 0.021 } link_t [026] [e] 11 7 5.03 r{ + 2/0.021 0.030 } link_t [029] [e] 7 13 1.27 r{ - 1/0.040 0.050 } link_t [030] [e] 13 3 -5.13 r{ - 0/0.020 0.041 } link_t [038] [e] 11 3 6.86 r{ - 2/0.032 0.043 } link_t [042] [e] 0 11 2.43 r{ - 1/0.011 0.027 } link_t [043] [e] 11 5 -1.64 r{ + 2/0.027 0.003 } link_t [044] [e] 2 11 -0.37 r{ + 3/0.013 0.023 } link_t [046] [e] 11 4 -8.51 r{ + 0/0.024 0.036 } link_t [053] [e] 11 19 -1.32 r{ - 3/0.058 0.074 } link_t [054] [e] 19 5 -7.22 r{ - 3/0.022 0.105 } link_t [055] [e] 19 4 -8.26 r{ + 3/0.076 0.031 } link_t [060] [e] 19 3 -4.63 r{ - 1/0.155 0.021 } link_t [064] [e] 1 19 -0.33 r{ + 2/0.048 0.016 } link_t [078] [e] 4 13 9.26 r{ + 3/0.078 0.029 } link_t [079] [e] 0 13 -2.86 r{ + 3/0.021 0.009 } link_t [080] [e] 2 13 2.33 r{ + 1/0.039 0.085 } link_t [080] [e] 2 13 -3.19 r{ - 1/0.086 0.061 } link_t [082] [e] 11 13 7.32 r{ + 3/0.034 0.042 } link_t [083] [e] 5 13 -2.39 r{ - 2/0.029 0.006 } link_t [085] [e] 1 13 3.85 r{ - 0/0.039 0.038 } link_t [093] [e] 2 19 -2.90 r{ - 1/0.020 0.021 } link_t [094] [e] 7 19 4.30 r{ + 1/0.001 0.056 } link_t [095] [e] 19 13 2.90 r{ - 2/0.046 0.025 } Research Qualifying Exam
Outline • Motivation and Related Work • System Overview and Results • Conclusions • Motivation and Related Work • System Overview and Results • Conclusions Research Qualifying Exam
Conclusions: Contributions • A GRN model that features a variably-decoding phenotype • Robust • A genome that can choose between different expressions • Adaptive • A controller where the env. Feeds back to the GRN • Complex behaviors • A genome that codes for multiple behaviors Research Qualifying Exam
Env1 Env0 Conclusions: Cars bias_t [000] 0.000 inpt_t [001] 0.000 inpt_t [002] 0.000 outp_t [003] 1.000 hidn_t [004] 0.500 r{ + 1/0.029 0.054 } hidn_t [005] 0.500 r{ - 0/0.022 0.043 } hidn_t [007] 0.250 r{ - 0/0.030 0.049 } hidn_t [011] 0.125 r{ + 2/0.046 0.017 } hidn_t [013] 0.625 r{ - 1/0.012 0.096 } hidn_t [019] 0.313 r{ + 3/0.013 0.048 } link_t [000] [e] 0 3 5.88 r{ - 2/0.028 0.039 } link_t [001] [e] 2 3 -3.90 r{ - 2/0.007 0.037 } link_t [001] [e] 2 3 8.10 r{ + 0/0.021 0.005 } link_t [002] [e] 1 3 -6.04 r{ + 3/0.007 0.008 } link_t [003] [e] 2 4 2.70 r{ - 2/0.026 0.036 } link_t [004] [e] 4 3 11.65 r{ - 0/0.035 0.065 } link_t [005] [e] 1 5 -9.92 r{ + 1/0.007 0.040 } link_t [005] [e] 1 5 -10.55 r{ + 2/0.102 0.024 } link_t [005] [e] 1 5 -6.01 r{ + 1/0.021 0.014 } link_t [006] [e] 5 3 -8.85 r{ - 3/0.081 0.010 } link_t [007] [e] 1 4 6.69 r{ - 1/0.049 0.050 } link_t [008] [e] 0 4 -1.19 r{ - 2/0.088 0.005 } link_t [008] [e] 0 4 8.59 r{ - 2/0.045 0.019 } link_t [008] [e] 0 4 -4.49 r{ - 0/0.012 0.034 } link_t [009] [e] 0 5 1.68 r{ - 3/0.051 0.051 } link_t [010] [e] 2 5 3.76 r{ - 0/0.050 0.008 } link_t [010] [e] 2 5 3.41 r{ + 0/0.071 0.026 } link_t [010] [e] 2 5 -10.39 r{ - 3/0.054 0.067 } link_t [013] [e] 1 7 1.17 r{ + 3/0.097 0.022 } link_t [014] [e] 7 5 -12.00 r{ - 3/0.004 0.042 } link_t [017] [e] 2 7 7.27 r{ + 0/0.046 0.045 } link_t [018] [e] 7 4 -1.33 r{ - 2/0.023 0.040 } link_t [021] [e] 7 3 5.15 r{ - 2/0.006 0.059 } link_t [021] [e] 7 3 2.48 r{ + 0/0.031 0.030 } link_t [022] [e] 0 7 -3.24 r{ - 1/0.026 0.064 } link_t [022] [e] 0 7 7.14 r{ + 3/0.050 0.070 } link_t [025] [e] 1 11 7.35 r{ + 3/0.028 0.021 } link_t [026] [e] 11 7 5.03 r{ + 2/0.021 0.030 } link_t [029] [e] 7 13 1.27 r{ - 1/0.040 0.050 } link_t [030] [e] 13 3 -5.13 r{ - 0/0.020 0.041 } link_t [038] [e] 11 3 6.86 r{ - 2/0.032 0.043 } link_t [042] [e] 0 11 2.43 r{ - 1/0.011 0.027 } link_t [043] [e] 11 5 -1.64 r{ + 2/0.027 0.003 } link_t [044] [e] 2 11 -0.37 r{ + 3/0.013 0.023 } link_t [046] [e] 11 4 -8.51 r{ + 0/0.024 0.036 } link_t [053] [e] 11 19 -1.32 r{ - 3/0.058 0.074 } link_t [054] [e] 19 5 -7.22 r{ - 3/0.022 0.105 } link_t [055] [e] 19 4 -8.26 r{ + 3/0.076 0.031 } link_t [060] [e] 19 3 -4.63 r{ - 1/0.155 0.021 } link_t [064] [e] 1 19 -0.33 r{ + 2/0.048 0.016 } link_t [078] [e] 4 13 9.26 r{ + 3/0.078 0.029 } link_t [079] [e] 0 13 -2.86 r{ + 3/0.021 0.009 } link_t [080] [e] 2 13 2.33 r{ + 1/0.039 0.085 } link_t [080] [e] 2 13 -3.19 r{ - 1/0.086 0.061 } link_t [082] [e] 11 13 7.32 r{ + 3/0.034 0.042 } link_t [083] [e] 5 13 -2.39 r{ - 2/0.029 0.006 } link_t [085] [e] 1 13 3.85 r{ - 0/0.039 0.038 } link_t [093] [e] 2 19 -2.90 r{ - 1/0.020 0.021 } link_t [094] [e] 7 19 4.30 r{ + 1/0.001 0.056 } link_t [095] [e] 19 13 2.90 r{ - 2/0.046 0.025 } Research Qualifying Exam
Conclusions: Next Robots Research Qualifying Exam
Long-term Objectives: Project Overview An outline of the work to be done between now and October ‘05 I. Academic a. Literature search / reading b. Qualifying examination c. Thesis proposal d. Doctoral dissertation II. Robotic platform a. Design and fabrication b. Robot chassis and motor system c. Sensors and cameras d. Firmware and drivers III. Software a. Artificial brain modules: i. NEATer with GRN ii. NEATer with development iii. NEATer with topology iv. Synthetic Brains (integrated) b. Simulation and evolution: i. Simulated arm and motors ii. Simulated sensors iii. Evolutionary algorithm Research Qualifying Exam