Download
1 / 30
330 likes | 486 Views
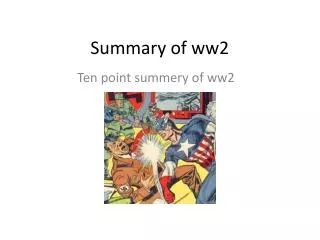
SUMMARY OF SM1. M zI. n. P 3. P 2. M wII. S zII. S w I. O. P 1. S zI. O. P i. S wII. M wI. M zII. n. P n. { w I }. { w II }. Internal forces. { w I } ≡ { Z II }. { w I } ≡ { Z II }. { w II } ≡ { Z I }. { w II } ≡ { Z I }. S wI ≡ S zII M wI ≡ M zII.

E N D
MzI n P3 P2 MwII SzII SwI O P1 SzI O Pi SwII MwI MzII n Pn {wI} {wII} Internal forces {wI} ≡ {ZII} {wI} ≡ {ZII} {wII} ≡ {ZI} {wII} ≡ {ZI} SwI≡ SzII MwI≡ MzII SwII ≡SzI MwII≡MzI SwI≡ - SwII MwI≡ - MwII
Swz Mwz Sw Mw z Swx Mwx Sny Mwy x y Cross-sectional forces In 3D vectors of internal forces resultants have three components each Sw{ Swx , Swy , Swz} Mw{Mwx , Mwy , Mwz} Components of internal forces resultantsSwx , Swy , SwzandMwx , Mwy , Mwzare calledcross-sectional forces
P Sz z x q Sx y My . M M Cross-sectional forces In 2D number of cross-sectional forces is reduced, because loading and bars axes are in the same plane (x, z): Sw{ Sx , 0, Sz} Mw{ 0, My , 0 } We will use following notations and names for these components: Sx=N - axial forces Sz=Q - shear force My = M - bending moment
Cross-sectional forces in 2D bars Special cases of internal forces reductions are called: N TENSION – when internal forces reduce to the sum vector only, which is parallel to the bar axis SHEAR – when internal forces reduce to the sum vector only, which is perpendicular to the bar axis Q M BENDING – when internal forces reduce to the moment vector only, which is perpendicular to the bar axis TORSION – when internal forces reduce to the moment vector only, which is parallel to the bar axis Ms
Internal forces – state of stress n {wI} A n {ZI} P1 A I Pn The sum of all internal forces acting on ΔA Δw ΔA – area ofpoint A neighbourhood Neighbourhood of point A Stress vector at A
Internal forces – state of stress n3 n2 n1 x3 x2 x1 Stress vector is a measure of internal forces intensity and depends on the chosen point and cross section Stress vectors: p1[σ11 , σ12 , σ13 ] σ33 p3 p2[σ21 , σ22 , σ23 ] σ32 p3[σ31 , σ32 , σ33 ] σ31 σ23 p2 σ13 σ11 , σ12 , σ13 p1 σ22 σ21 , σ22 , σ23 Tσ σ11 σ31 , σ32 , σ33 σ31 , σ32 , σ33 σ21 σ12 Stress matrix Tσ(σij) Point A image Components ijof matrix T are called stresses. Stress measure is [N/m2] i.e. [Pa] i,j = 1,2,3
Internal forces – state of stress x3 x2 x1 X1= 0 ν(νi ) …, … ΔAν n1 ΔA1 ΔA2 n2 ΔA3 If we assume: then: n3
Internal forces – state of stress n3 σ33 p3 3 σ32 n2 x3 σ31 σ23 σ13 p2 p1 n1 σ22 2 σ11 σ21 σ12 x2 1 x1 With given stress matrix in the chosen point and given loading one can find 3 perpendicular planes such that stress vectors (principal stresses) have only normal components (no shear components).The coordinate system defined by the directions of principal stresses is called system of principal axis.
It can be proved that are extreme values of normal stresses (stresses on a main diagonal of stress matrix) . Customary, these values are ordered as follows Internal forces – state of stress Surface of an ellipsoid with semi-axis (equatorial radii) equal to the values of principal stresses represents all possible stress vectors in the chosen point and under given loading.
Mohr circles – represent 3D state of stress in a given point – on the plane of normal and shear stresses 0 max
Stress distribution On the body surface stress vector has to be balanced by the traction vector Stress on the body surface Coordinates of vector normal to the surface This equation states statics boundary conditions to comply with the solution of the equation: This equation (Navier equation) reflects internal equilibrium and has to be fulfilled in any point of the body (structure).
Stress distribution Navier equation in coordintes reads: We have to deal with the set of 3 linear partial differential equations. There are 6 unknown functions which have to fulfil static boundary conditions (SBC): We need more equations to determine all 6 functions of stress distribution. To attain it we have to consider deformation of the body.
State of deformation - strains A A’ Displacement vector B A B’ A’
State of deformation - strains Small strains Normal strains when i=j Shear strains when ij Strain matrix – symmetrical by definition of angular strains
x3 x2 x1 State of deformation - strains
State of deformation - strains Eigenvalues of strain matrix are normal strains on the planes where there are no shear strains. Principal strains can be found by solving the secular equation: where I1, I2, I3are invariants of strain matrix When transfer of strain matrix is made to the new co-ordinate system then matrix transformation rule holds: In the co-ordinates defined by principal directions of strain matrix it takes the diagonal form. - principal strains
P Material deformability properties u Constitutive equation - Hooke law Strain versus stress Deformation versus internal forces General property of majority of solids is elasticity (instantaneous shape memory) This observation was made already in 1676 by Robert Hooke: CEIIINOSSSTTUV UT TENSIO SIC VIS which reads: „as much the extension as the force is” where k is a constant dependent on a material and body shape Linear elasticity
Constitutive equation - Hooke law To make Hooke’s law independent of a body shape one has to use state variables characterizing internal forces and deformations in a material point i.e. stress and strain. Kinematics Dynamics Physical quantities (measurable) Hooke, 1678 Mathematical quantities (non-measurable) Navier, 1822 f- linear function of all strain matrix components defining all stress component matrix
Constitutive equation - Hooke law As Hooke equation is a set of 9 linear algebraic equations then the number of coefficient in this set is 81 and can be represented as a matrix of 34=81 components: The coefficients of this equation do depend only on the material considered, but not on the body shape. Summation over kl indices reflects linear character of this constitutive equation.
Constitutive equation - Hooke law Lamé constants [Pa] Summation obeys ! Kronecker delta This equation consists of two groups: Normal stress and normal strain dependences Shear stress and shear strain dependences
Constitutive equation - Hooke law Young modulus[Pa] Poisson modulus[0] Summation obeys ! Kronecker’s delta Normal stress and normal strain dependences Shear stress and shear strain dependences
Constitutive equation - Hooke law Volume change law Distortion law
BVP–Boundary Value Problem of Linear Elasticity SBC NE , KBC CE HE The set of NE+CE+ HE equations consists of 15 linear differential-algebraic equations – and is always the same for any static problem (except of material constants in HE). Individual problems are different only due to different boundary conditions, which define body shape i , loading qi and displacements ui on the body surface (supports). Here is where name Boundary Value Problem of Elasticity comes from.
Remarks on the solutions of special cases N De SAINT-VENANT HYPOTHESIS When solving BVP any change in boundary conditions - especially these of static - require that the separate solution of a complex set of BVP differential equations has to be searched for. An important observation which simplifies this problem was made by de Saint-Venant . He noticed that for points of a body far away from the points where loading is applied the solution does not depend on the details of different loadings – provided that the resultants of loading are the same. It is worthy to mention that the solution of BVP is very general one – though in many cases analytically not possible to be found. TENSION – when internal forces reduce to the sum vector only, which is parallel to the bar axis SHEAR – when internal forces reduce to the sum vector only, which is perpendicular to the bar axis Q M BENDING – when internal forces reduce to the moment vector only, which is perpendicular to the bar axis TORSION – when internal forces reduce to the moment vector only, which is parallel to the bar axis Ms
Special cases of cross-sectional forces reduction BERNOULLI HYPOTHESIS If we will pay attention to the chosen bar cross-section we may judge the solution fulfilling BVP only on the basis of another experimental observation. Such an observation was made be Bernoulli who noticed that in many cases the plane cross-sections before loading remain plane after loading is applied. However, this solution is limited only to the stresses and strains; the Kinematic Boundary Conditions have to be considered for the displacement evaluation. The Bernoulli hypothesis allows for much simpler – though more limited solutions - when compared to BVP ones. N TENSION – when internal forces reduce to the sum vector only, which is parallel to the bar axis SHEAR – when internal forces reduce to the sum vector only, which is perpendicular to the bar axis Q M BENDING – when internal forces reduce to the moment vector only, which is perpendicular to the bar axis TORSION – when internal forces reduce to the moment vector only, which is parallel to the bar axis Ms
Force = mass * acceleration 1N = 1 kg (1 m/s2) If acceleration = 9,81 m/s2 1N = 0,102 kg* (9,81 m/s2); 1 kg yields 10 N, 1 ton yields 10 kN Stress = force/area 1 Pa = 1N/(1 m2) If mass = 102 g = 0,102 kg (=mass of 1 square meter of standard writing paper) Pressure = 1Pa If mass = 1kg (= mass of 1 liter of water = 0,001 m3 of water) Pressure = 10 P If mass = 1 t = 1000kg (= mass of a car) Pressure = 10 000 P = 10 kP
1. Hipoteza dSV: W punktach ciała dostatecznie odległych od miejsca przyłożenia obciazenia rozkład naprężeń i odkształceń nie zależy od sposobu przyłożenia tego obciążenia – pod warunkiem, że są one statycznie równoważne Pozwala ona na uogólnienie rozwiązania ZB TS na różne przypadki obciążenia (różne Statyczne Warunki Brzegowe), w wyniku czego otrzymujemy komplet rozwiązania w postaci naprężeń, odkształceń i przemieszczeń. Rozwiązanie zadania brzegowego TS z uwzględnieniem hipotezy dSV uwalnia nas od posługiwania się pojęciem przypadków wytrzymałościowych Przykładem zastosowania zasady dSV jest przypadek swobodnego skręcania pręta pryzmatycznego, który pokazuje, że przekroje płaskie po przyłożenia obciążenia nie zawsze takimi pozostają. De Saint-Venant and Bernoulli hypotheses
De Saint-Venant and Bernoulli hypotheses 2. Hipoteza B: • Przekroje poprzeczne pręta płaskie przed przyłożeniem obciążenia pozostają płaskie także po jego przyłożeniu • Pozwala ona (szczególnych przypadków redukcji sił przekrojowych) na założenie - dla poszczególnych przypadków wytrzymałościowych - przemieszczeń przekroju poprzecznego pręta i na tej podstawie wyznaczenie odkształceń a następnie naprężeń. Wyznaczenie przemieszczeń wymaga uwzględnienia kinematycznych warunków brzegowych. • Hipoteza B pozwala na określenie naprężeń i odkształceń w dowolnym przekroju pręta bez potrzeby uciekania się każdorazowo do rozwiązywania skomplikowanego zadania brzegowego TS. • Hipotezę B stosuje się do podstawowych przypadków wytrzymałościowych: rozciąganie skręcanie a także ścinanie – przy odpowiednich ograniczeniach co do geometrii pręta (pręt pryzmatyczny, o długości znacznie większej niż wymiary poprzeczne)