Download
1 / 23
230 likes | 478 Views
Project Seminar Kalman Filtering Advanced Topics in Statistical Signal Processing Mirza Ahmad Baig. Outline. Introduction Dynamic System Discrete Kalman Filter Kalman Filter Example Extended Kalman Filter Summary. Introduction. What is Kalman Filter Optimal Estimator

E N D
Project Seminar Kalman Filtering Advanced Topics in Statistical Signal Processing Mirza Ahmad Baig Advanced Topics in Statistical Signal Processing
Outline • Introduction • Dynamic System • Discrete Kalman Filter • Kalman Filter Example • Extended Kalman Filter • Summary Advanced Topics in Statistical Signal Processing
Introduction • What is Kalman Filter • Optimal Estimator • Estimate the state of a process recursively by minimizing the MSE. • Each updated estimate of the state is computed from previous estimate and new input data. • Perform Prediction and Filtering • Applicable to stationary as well as nonstationary environments Advanced Topics in Statistical Signal Processing
Introduction Applications • Tracking • Aerospace • Computer Vision • Process Control • Communication • Navigation Advanced Topics in Statistical Signal Processing
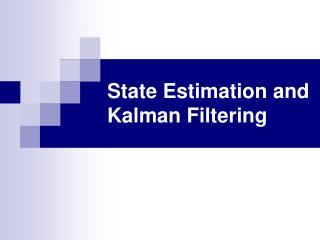
Process Equation Measurement Equation Previous State Next State State Measurement Dynamic System Parts of Discretised Dynamic System Advanced Topics in Statistical Signal Processing
contains the states of the process • A is State Transition Matrix • Bgoverns the effect of the control input on the state • is the control input • is process Noise with Process Equation Advanced Topics in Statistical Signal Processing
Measurement Equation • is the measurement • H maps the process state to a measurement • is the measurement noise with Advanced Topics in Statistical Signal Processing
B δk-1 H + + A Dynamic System Model wk vk xk uk zk Process Equation Measurement Equation Dynamic System Model (State Space Model) Advanced Topics in Statistical Signal Processing
Prediction Correction Start Discrete Kalman Filter (Two step operation) Advanced Topics in Statistical Signal Processing
Correction: Correct the estimate based on observation Find that makes optimal in MMSE sense ? Discrete Kalman Filter Prediction: Using prior knowledge Advanced Topics in Statistical Signal Processing
Discrete Kalman Filter Let define (Predicted state vector error) (Filtered State Vector Error) (Predicted State Vector Error Covariance) (Filtered State Vector Error Covariance) Advanced Topics in Statistical Signal Processing
Discrete Kalman Filter Choosing the Kalman gain Kk according to the MMSE-Criterion Gives Advanced Topics in Statistical Signal Processing
Initial estimates for and Kalman Filter Algorithm Time Update (Prediction) Project the state ahead Project the error covariance ahead Measurement Update (Correction) Compute the Kalman gain Update estimate with measurement zk Update the error covariance Advanced Topics in Statistical Signal Processing
Kalman Filtering Example Estimating a Random Constant voltage with additive noise State Space Equations Process Equation Measurement Equation Advanced Topics in Statistical Signal Processing
Correction Prediction Kalman Filtering Example Kalman Algorithm Advanced Topics in Statistical Signal Processing
True Value Noisy Measurement + + Filter Estimate Kalman Filtering Example R=0.01, x=-0.37727 Advanced Topics in Statistical Signal Processing
Kalman Filtering Example After 50 iterations, our initial (rough) Pk =1 has settled to about 0.0002 (Volts2). Error covariance Advanced Topics in Statistical Signal Processing
Kalman Filtering Example Iteration R=1. Filter is slower to respond to the measurements, resulting in reduced estimate variance. Advanced Topics in Statistical Signal Processing
Kalman Filtering Example Iteration R=0.0001. The filter responds to measurements quickly, increasing the estimate variance. Advanced Topics in Statistical Signal Processing
Extended Kalman Filter Nonlinear Model Transition Matrix A becomes f(x, u,w) Measurement Matrix H becomes h(x, v) Filter Reformulation Use functions instead of Matrix Use Jacobian to project forward & to relate measurement to state Advanced Topics in Statistical Signal Processing
Summary The basic Kalman filter is a linear, discrete-time, finite-dimensional system with a recursive structure. Due to recursive structure well suited for computer implementation. A key property of the Kalman filter is that it is MMSE. The Kalman filter, applies to a linear dynamical system, the state space model of which consists of two equations: 1) Process Equation 2) Measurement Equation Applications of Kalman filter may be extended to nonlinear dynamical systems. Advanced Topics in Statistical Signal Processing
References [1] Abdelhak M. Zoubir, “Manuscript draft for Digital Signal Processing,” 2005 [2] Greg Welch and Gary Bishop, “An Introduction to the Kalman Filter,” 2001 [3] Anderson Moore, “Optimal Filtering,”2005 [4] Simon Haykin, “Kalman Filtering & Neural Networks,”2001 Advanced Topics in Statistical Signal Processing
Questions ? Advanced Topics in Statistical Signal Processing