Download

1 / 41
• 410 likes • 529 Views
Detección de Movimiento en Imágenes Digitales. “tracking” Por: Héctor Duque <he-cifue@uniandes.edu.co> MISC - Universidad de Los Andes. Contenido. (1) El problema del “tracking” (2) Objetivos propuestos (3) Marco Teórico (4) Metodología Propuesta (5) Resultados

E N D
Detección de Movimientoen Imágenes Digitales “tracking” Por: Héctor Duque <he-cifue@uniandes.edu.co> MISC - Universidad de Los Andes
Contenido ... • (1) El problema del “tracking” • (2) Objetivos propuestos • (3) Marco Teórico • (4) Metodología Propuesta • (5) Resultados • (6) Conclusiones y Trabajo Futuro • (7) Créditos y Bibliografía
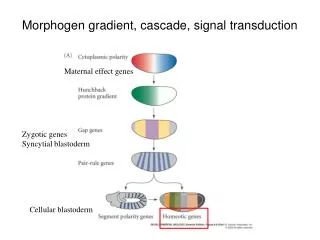
(1) El problema del “tracking” ... 1 Segmento = N Frames consecutivos ... Mov en x Mov en y
(1) El problema del “tracking” ... una realidad en 3 dimensiones proyectada sobre un mundo bi-dimensional. Se representa mediante la adición de la variable tiempo en la función de la imagen f(x1,x2,t)]. Hacer seguimiento a objetos móviles en secuencias de movimiento y determinar características cuantitativas y cualitativas de estos.
(1) El problema del “tracking” en Marcha Humana ... El análisis de marcha consiste en extraer características de objetos existentes en escenas de Marcha.
(2) Objetivos propuestos • Desarrollar una metodología para detectar las condiciones de movimiento en secuencias de imágenes • Implementar un prototipo para mostrar la aplicabilidad de dicha metodología • Aplicar la metodología a Marcha Humana para obtener vectores de velocidad y trayectoria
(3) Marco Teórico 1 1 ....... [1 , 0, 0 ] [ 0, 1, 0] ........ [ 0, .... ] SUM= * exp[j2kxt] * exp[j2kxt] * exp[j2k(x+1)t] * exp[j2k(x+t)t] = cos(j2k(x+t)t) + jsin(j2k(x+t)t)
(3) Marco Teórico Proyecciones pesadas M-1 N-1 S S D g (t,k ) = f(x,y,t) exp(j2 k x ), t=0, 1, ..., T-1 P x 1 1 t x=0 y=0 y, M-1 N-1 S S D g (t,k ) = f(x,y,t) exp(j2 k y ), t=0, 1, ..., T-1 P y 2 2 t x=0 y=0 ==> sinosoide complejo con frec vk si se mueve v pixels
(3) Marco Teórico La Transformada del Coseno. • La transformada del coseno corresponde a • la parte real de las funciónes de proyección • con peso gx(t,k1) y gy(t,k2),
u = v k u = v k 1 1 1, 2 2 2 (3) Marco Teórico Transformada de Fourier T-1 S G (u ,k ) = 1/T g (t,k ) exp(-j2 u t / T), u =0, 1, ..., T-1 P x 1 1 x 1 1 1 t=0 y, T-1 S G (u ,k ) = 1/T g (t,k ) exp(-j2 u t / T), u =0, 1, ..., T-1 P y 2 2 y 2 2 2 t=0 Espectro con pico en vk
(3) Marco Teórico Imágenes de Diferencias Acumuladas ( Absoluta, Negativa y Positiva) q f (x ,x ,t ,t ) = 1, si | f(x ,x ,t ) - f(x ,x ,t ) | > T d 1 2 1 2 1 2 2 1 2 1 d 0, en caso contrario AADI PADI NADI
(4) Metodología Propuesta ... Preparación Imágenes 4.1. Máscaras 4.2. Binarización 4.3. Dilatación / Erosión 4.4. Escalamiento en Y
SUMA DILATACION EROSION (4) Metodología Propuesta ... Preparación Imágenes ESCALA_ MIENTO Y
(4) Metodología Propuesta ... Procesamiento de las Imágenes Fourier Fourier Fourier Fourier Velocidad Fourier Fourier Posición Padi Padi Padi Padi Padi Padi 4.5. POLIGONIZAR ...
(4) Metodología Propuesta ... Toma del Video • 13 zonas • 3 segmentos / zona • 8 frames / segmento ==> 288 frames • para 3 segundosse tienen aprox 90 fr/s
90 fr 0 30 X 3 =1 fr 0 128 30 X 3 288 fr (4) Metodología Propuesta ... Toma del Video
(4) Metodología Propuesta ... Procesamiento de las Imágenes 4.6. Tracking (posición y velocidad)
(4) Metodología Propuesta ... Procesamiento de las Imágenes 4.7. Escalamiento Inverso
(4) Metodología Propuesta ... Procesamiento de las Imágenes 4.7. Cálculo error
(5) Resultados ... Videos ... Rooosvelt 03 RODILLA
(5) Resultados ... Transformada Coseno X/Y roosvelt 03 RODILLA
(5) Resultados ... Comportamiento Velocidad en X/Y roosvelt03 RODILLA
(5) Resultados ... Videos ... Roosvelt 03 PIE
(5) Resultados ... Transformada Coseno X/Y roosvelt 03 PIE
(5) Resultados ... Comportamiento Velocidad en X/Y roosvelt 03 PIE
(5) Resultados ... Videos ... hec CINTURA
(5) Resultados ... Transformada Coseno X/Y hec CINTURA
(5) Resultados ... Comportamiento Velocidad en X/Y hec CINTURA
(5) Resultados ... Videos ... hec RODILLA
(5) Resultados ... Transformada Coseno X/Y hec RODILLA
(5) Resultados ... Comportamiento Velocidad en X/Y hec RODILLA
(5) Resultados ... Videos ... Roosvelt 01 RODILLA
Error: 6% al 10% roosvelt 03 RODILLA
(6) Conclusiones • El cálculo de trayectoria es altamente satisfactorio. • El cálculo de velocidad se ve afectado cuando haycambios de dirección o velocidad • El cálculo de la velocidad es útil a nivel local. • La velocidad detectada no tiene sentido a nivel global (no se puede determinar una velocidad total)
Pico (cambio de dirección) Aceleración (cambio de velocidad) (6) Trabajo Futuro
(6) Trabajo Futuro • Investigar técnicas de manejo de aceleración en los objetos móviles. • Detección simultánea de varios puntos móviles en tiempo real. • Basado en cámaras sincronizadas obtener trayectorias en 3 dimensiones. • Implementación eficiente usando técnicas de algorítmica paralela para lograr análisis de trayectoria en tiempo real
Proyecto de tesis de • Maestría en Ingeniería de Sistemas y Computación (MISC) • Universidad de Los Andes. • Asesores: • José Tiberio Hernández - Sistemas • Alfredo Restrepo - Eléctrica • Harold Castro - Sistemas • Jaime Bohorquez - Sistemas Principal fuente bibliográfica: Application of the One-Dimensional Fourier Transform for Tracking Moving Objects in Noisy Environments, Sarah A. Rajala, Alfy N. Riddle, Wesley E. Snyder, Computer Vision, Graphics And Image Processing 21, 280-293, 1983 Displacement Measurement and Its Application in Interframe Image Coding, Jain J.R., IEEE trans Computers, vol COM29, pp 1799-1808, 1981






![[III] Genes, Genomics, and Chromosomes](https://cdn1.slideserve.com/3548265/iii-genes-genomics-and-chromosomes-dt.jpg)