Download
1 / 1
10 likes | 116 Views
John Doe 1. Department of Physics and Physical Oceanography, Memorial University: johndoe@mun.ca 2. Department of Oceanography, Dalhousie University janedoe@mun.ca. An Evaluation of Doppler Sonar for Measuring Bedload Transport. 1. Introduction

E N D
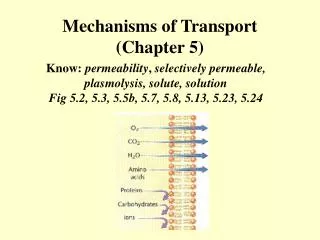
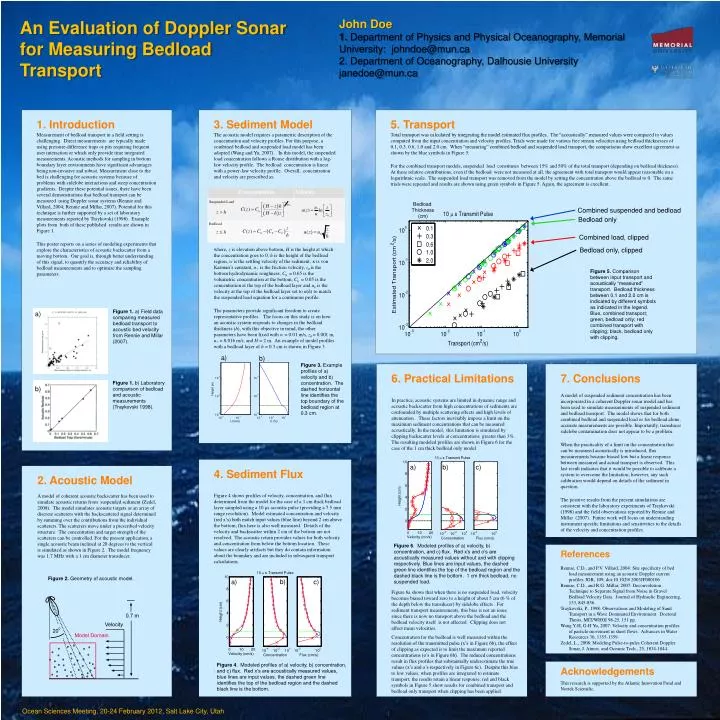
John Doe1. Department of Physics and Physical Oceanography, Memorial University: johndoe@mun.ca 2. Department of Oceanography, Dalhousie University janedoe@mun.ca An Evaluation of Doppler Sonar for Measuring Bedload Transport 1. Introduction Measurement of bedload transport in a field setting is challenging. Direct measurements are typically made using pressure-difference traps or pits requiring frequent user interaction or which only provide time integrated measurements. Acoustic methods for sampling in bottom boundary layer environments have significant advantages being non-invasive and robust. Measurement close to the bed is challenging for acoustic systems because of problems with sidelobe interactions and steep concentration gradients. Despite these potential issues, there have been several demonstrations that bedload transport can be measured using Doppler sonar systems (Rennie and Villard, 2004; Rennie and Millar, 2007). Potential for this technique is further supported by a set of laboratory measurements reported by Traykovski (1998). Example plots from both of these published results are shown in Figure 1. This poster reports on a series of modeling experiments that explore the characteristics of acoustic backscatter from a moving bottom. Our goal is, through better understanding of this signal, to quantify the accuracy and reliability of bedload measurements and to optimize the sampling parameters. 3. Sediment Model The acoustic model requires a parametric description of the concentration and velocity profiles. For this purpose, a combined bedload and suspended load model has been adopted (Wang and Yu, 2007). In this model, the suspended load concentration follows a Rouse distribution with a log-law velocity profile. The bedload concentration is linear with a power-law velocity profile. Overall, concentration and velocity are prescribed as: where, z is elevation above bottom, H is the height at which the concentration goes to 0, h is the height of the bedload region, w is the settling velocity of the sediment, is von Karman’s constant, u* is the friction velocity, z0is the bottom hydrodynamic roughness, C0 = 0.65 is the volumetric concentration at the bottom, Ch = 0.05 is the concentration at the top of the bedload layer and uh is the velocity at the top of the bedload layer set to u(h) to match the suspended load equation for a continuous profile. The parameters provide significant freedom to create representative profiles. The focus on this study is on how an acoustic system responds to changes in the bedload thickness (h), with this objective in mind, the other parameters have been fixed with w = 0.01 m/s, z0 = 0.001 m, u*= 0.016 m/s, and H = 2 m. An example of model profiles with a bedload layer of h = 0.3 cm is shown in Figure 3. 5. Transport Total transport was calculated by integrating the model estimated flux profiles. The “acoustically” measured values were compared to values computed from the input concentration and velocity profiles. Trials were made for various free stream velocities using bedload thicknesses of 0.1, 0.3. 0.6, 1.0 and 2.0 cm. When “measuring” combined bedload and suspended load transport, the comparisons show excellent agreement as shown by the blue symbols in Figure 5. For the combined transport models, suspended load constitutes between 15% and 50% of the total transport (depending on bedload thickness). At these relative contributions, even if the bedload were not measured at all, the agreement with total transport would appear reasonable on a logarithmic scale. The suspended load transport was removed from the model by setting the concentration above the bedload to 0. The same trials were repeated and results are shown using green symbols in Figure 5. Again, the agreement is excellent. Bedload Thickness (cm) Combined suspended and bedload Bedload only Combined load, clipped Bedload only, clipped Figure 5. Comparison between input transport and acoustically “measured” transport. Bedload thickness between 0.1 and 2.0 cm is indicated by different symbols as indicated in the legend. Blue, combined transport; green, bedload only; red combined transport with clipping; black, bedload only with clipping. Figure 1. a)Field data comparing measured bedload transport to acoustic bed velocity from Rennie and Millar (2007). a) a) b) Figure 3. Example profiles of a) velocity and b) concentration. The dashed horizontal line identifies the top boundary of the bedload region at 0.3 cm. 6. Practical Limitations In practice, acoustic systems are limited in dynamic range and acoustic backscatter from high concentrations of sediments are confounded by multiple scattering effects and high levels of attenuation. These factors inevitably impose a limit on the maximum sediment concentrations that can be measured acoustically. In the model, this limitation is simulated by clipping backscatter levels at concentrations greater than 3%. The resulting modeled profiles are shown in Figure 6 for the case of the 1 cm thick bedload only model. Figure 6a shows that when there is no suspended load, velocity becomes biased toward zero to a height of about 5 cm (6 % of the depth below the transducer) by sidelobe effects . For sediment transport measurements, this bias is not an issue since there is now no transport above the bedload and the bedload velocity itself is not affected. Clipping does not affect mean velocities. Concentration for the bedload is well measured within the resolution of the transmitted pulse (x’s in Figure 6b), the effect of clipping as expected is to limit the maximum reported concentrations (o’s in Figure 6b). The reduced concentrations result in flux profiles that substantially underestimate the true values (x’s and o’s respectively in Figure 6c). Despite this bias to low values, when profiles are integrated to estimate transport, the results retain a linear response: red and black symbols in Figure 5 show results for combined transport and bedload only transport when clipping has been applied. 7. Conclusions A model of suspended sediment concentration has been incorporated in a coherent Doppler sonar model and has been used to simulate measurements of suspended sediment and bedload transport. The model shows that for both combined bedload and suspended load or for bedload alone, accurate measurements are possible. Importantly, transducer sidelobe contamination does not appear to be a problem. When the practicality of a limit on the concentration that can be measured acoustically is introduced, flux measurements became biased low but a linear response between measured and actual transport is observed. This last result indicates that it would be possible to calibrate a system to overcome the limitation; however, any such calibration would depend on details of the sediment in question. The positive results from the present simulations are consistent with the laboratory experiments of Traykovski (1998) and the field observations reported by Rennie and Millar (2007). Future work will focus on understanding instrument specific limitations and sensitivities to the details of the velocity and concentration profiles. Figure 1. b) Laboratory comparison of bedload and acoustic measurements (Traykovski 1998). b) 4. Sediment Flux Figure 4 shows profiles of velocity, concentration, and flux determined from the model for the case of a 1 cm thick bedload layer sampled using a 10 μs acoustic pulse (providing a 7.5 mm range resolution). Model estimated concentration and velocity (red x’s) both match input values (blue line) beyond 2 cm above the bottom; flux here is also well measured. Details of the velocity and backscatter within 2 cm of the bottom are not resolved. The acoustic return provides values for both velocity and concentration from below the bottom location. These values are clearly artifacts but they do contain information about the boundary and are included in subsequent transport calculations. . a) b) c) 2. Acoustic Model A model of coherent acoustic backscatter has been used to simulate acoustic returns from suspended sediment (Zedel, 2008). The model simulates acoustic targets as an array of discrete scatterers with the backscattered signal determined by summing over the contributions from the individual scatterers. The scatterers move under a prescribed velocity structure. The concentration and target strength of the scatterers can be controlled. For the present application, a single acoustic beam inclined at 20 degrees to the vertical is simulated as shown in Figure 2. The model frequency was 1.7 MHz with a 1 cm diameter transducer. Figure 6. Modeled profiles of a) velocity, b) concentration, and c) flux. Red x’s and o’s are acoustically measured values without and with clipping respectively. Blue lines are input values, the dashed green line identifies the top of the bedload region and the dashed black line is the bottom. 1 cm thick bedload, no suspended load. References Rennie, C.D., and P.V. Villard, 2004: Site specificity of bed load measurement using an acoustic Doppler current profiler. JGR, 109, doi:10.1029/ 2003JF000106 Rennie, C.D., and R.G. Millar, 2007: Deconvolution Technique to Separate Signal from Noise in Gravel Bedload Velocity Data. Journal of Hydraulic Engineering, 133, 845-856. Traykovski, P., 1998: Observations and Modeling of Sand Transport in a Wave Dominated Environment. Doctoral Thesis, MIT/WHOI 98-25, 151 pp. Wang Y-H, G-H Yu, 2007: Velocity and concentration profiles of particle movement in sheet flows. Advances in Water Resources 30, 1355-1359. Zedel, L., 2008: Modeling Pulse-to-pules Coherent Doppler Sonar, J. Atmos. and Oceanic Tech., 25, 1834-1844. Figure 2. Geometry of acoustic model. b) a) c) Figure 4. Modeled profiles of a) velocity, b) concentration, and c) flux. Red x’s are acoustically measured values, blue lines are input values, the dashed green line identifies the top of the bedload region and the dashed black line is the bottom. Acknowledgements This research is supported by the Atlantic Innovation Fund and Nortek Scientific. Ocean Sciences Meeting, 20-24 February 2012, Salt Lake City, Utah