Download
1 / 1
10 likes | 105 Views
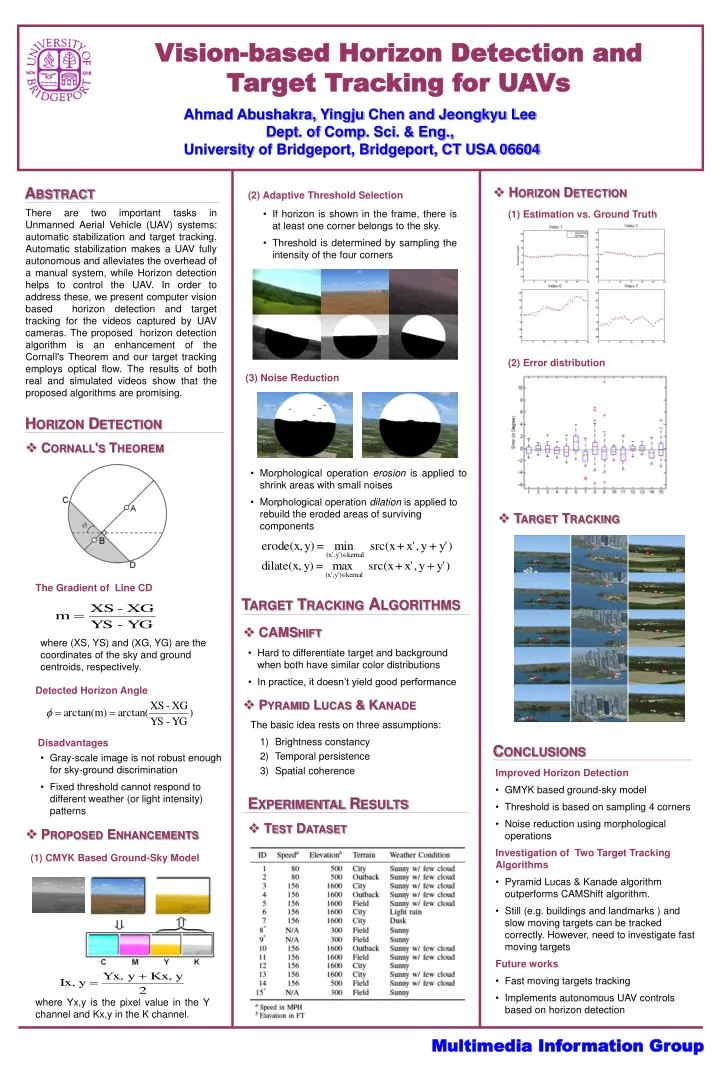
Vision-based Horizon Detection and Target Tracking for UAVs. Ahmad Abushakra, Yingju Chen and Jeongkyu Lee Dept . of Comp . Sci . & Eng., University of Bridgeport, Bridgeport, CT USA 06604. Horizon Detection. (2 ) Adaptive Threshold Selection. Abstract.

E N D
Vision-based Horizon Detection and Target Tracking for UAVs Ahmad Abushakra, Yingju Chen and Jeongkyu LeeDept. of Comp. Sci. & Eng.,University of Bridgeport, Bridgeport, CT USA 06604 • Horizon Detection • (2) Adaptive Threshold Selection Abstract There are two important tasks in Unmanned Aerial Vehicle (UAV) systems: automatic stabilization and target tracking. Automatic stabilization makes a UAV fully autonomous and alleviates the overhead of a manual system, while Horizon detection helps to control the UAV. In order to address these, we present computer vision based horizon detection and target tracking for the videos captured by UAV cameras. The proposed horizon detection algorithm is an enhancement of the Cornall's Theorem and our target tracking employs optical flow. The results of both real and simulated videos show that the proposed algorithms are promising. • If horizon is shown in the frame, there is at least one corner belongs to the sky. • Threshold is determined by sampling the intensity of the four corners • (1) Estimation vs. Ground Truth • (2) Error distribution • (3) Noise Reduction Horizon Detection • Cornall'sTheorem • Morphological operation erosion is applied to shrink areas with small noises • Morphological operation dilation is applied to rebuild the eroded areas of surviving components • Target Tracking • The Gradient of Line CD Target Tracking Algorithms • CAMShift where (XS, YS) and (XG, YG) are the coordinates of the sky and ground centroids, respectively. • Hard to differentiate target and background when both have similar color distributions • In practice, it doesn’t yield good performance • Detected Horizon Angle • Pyramid Lucas & Kanade • The basic idea rests on three assumptions: • Brightness constancy • Temporal persistence • Spatial coherence • Disadvantages Conclusions • Gray-scale image is not robust enough for sky-ground discrimination • Fixed threshold cannot respond to different weather (or light intensity) patterns • Improved Horizon Detection • GMYK based ground-sky model • Threshold is based on sampling 4 corners • Noise reduction using morphological operations • Investigation of Two Target Tracking Algorithms • Pyramid Lucas & Kanade algorithm outperforms CAMShift algorithm. • Still (e.g. buildings and landmarks ) and slow moving targets can be tracked correctly. However, need to investigate fast moving targets • Future works • Fast moving targets tracking • Implements autonomous UAV controls based on horizon detection Experimental Results • Test Dataset • Proposed Enhancements • (1) CMYK Based Ground-Sky Model where Yx,y is the pixel value in the Y channel and Kx,y in the K channel. Multimedia Information Group