Download
1 / 39
390 likes | 508 Views
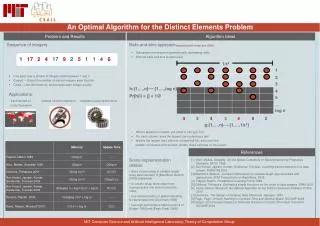
A Space-Optimal Data-Stream Algorithm for Coresets in the Plane. Pankaj K. Agarwal Joint work with Hai Yu. Extent Measures. Diameter, width, convex hull Simple shapes that enclose point sets Min-radius ball, min-volume box, min-radius cylinder

E N D
A Space-Optimal Data-Stream Algorithm for Coresets in the Plane Pankaj K. Agarwal Joint work with Hai Yu
Extent Measures • Diameter, width, convex hull • Simple shapes that enclose point sets • Min-radius ball, min-volume box, min-radius cylinder • Min-width cylindrical shell, min-width spherical shell • Maintaining shape descriptors for moving points • Applications • Computer graphics • Solid modeling • Machine learning • Data mining • Sensor networks
Approximation • ε-Kernel[A., Har-Peled, Varadarajan,04] a small subset that ε-approximate directional width of input points in all directions
Approximation • ε-Kernel[A., Har-Peled, Varadarajan,04] • This talk: maintaining an ε-kernel Q of a stream S of points a small subset that ε-approximate directional width of input points in all directions wu u computable an e-kernel of size 1/ed/2 in O(n+1/εd-3/2) time [A. etal, Chan] Wu results in linear-time approx algorithm for many extent measures
Results • Previous results • Our main result: a space-optimal data-stream algorithm in R2 • O(1/ε1/2) space, O(log1/ε) update time (amortized)
Algorithm Overview • Problem is easy if point set is fat
Algorithm Overview • Problem is easy if point set is fat
Algorithm Overview • Problem is easy if point set is fat • Keep track of nearest neighbor of each grid point • Can be implemented efficiently in O(log 1/ε) time per point Apply affine transform if point set not fat
Algorithm Overview • Epochs and subepochs o
Algorithm Overview • Epochs and subepochs o xi
Algorithm Overview • Epochs and subepochs o xi 2·||oxi|| an epoch
Algorithm Overview • Epochs and subepochs yj o xi 2·||oxi||
Algorithm Overview • Epochs and subepochs yj 2·d(yj,oxi) o xi 2·||oxi||
Algorithm Overview • Epochs and subepochs yj 2·d(yj,oxi) o xi 2·||oxi|| a subepoch
Algorithm Overview • Epochs and subepochs yj 2·d(yj,oxi) o xi 2·||oxi|| a subepoch
Algorithm Overview • Epochs and subepochs yj 2·d(yj,oxi) o xi 2·||oxi|| a subepoch
Algorithm Overview • Epochs and subepochs yj 2·d(yj,oxi) o xi 2·||oxi|| a subepoch
Algorithm Overview • Epochs and subepochs yj 2·d(yj,oxi) o xi 2·||oxi|| a subepoch
Algorithm Overview • Epochs and subepochs Starting a new subepoch yj+1 2·d(yj+1,oxi) o xi 2·||oxi||
Algorithm Overview • Epochs and subepochs yj+1 2·d(yj+1,oxi) o xi Starting a new epoch 2·||oxi||
Algorithm Overview • Epochs and subepochs 2·||oxi+1|| o Starting a new epoch xi+1
Algorithm Overview • Chan’s algorithm o x
Algorithm Overview • Chan’s algorithm • Keep last log(1/ε) epochs alive o x Too close to point o
Algorithm Overview • Chan’s algorithm • Keep last log(1/ε) epochs alive o x Too close to point o
Algorithm Overview • Chan’s algorithm • Keep last log(1/ε) epochs alive o x Too close to point o Too close to line ox • Keep last log(1/ε) subepochs alive
Algorithm Overview • Chan’s algorithm • Total space: (1/ε1/2) log2(1/ε) • Keep last log(1/ε) epochs alive o x Too close to point o Too close to line ox • Keep last log(1/ε) subepochs alive
New Ingredient • Prune points of previous epochs at the beginning of each new epoch • last log(1/ε) epochs o
New Ingredient • Prune points of previous epochs at the beginning of each new epoch • last log(1/ε) epochs o x
New Ingredient • Prune points of previous epochs at the beginning of each new epoch • last log(1/ε) epochs o x
New Ingredient • Prune points of previous epochs at the beginning of each new epoch • last log(1/ε) epochs o x • j-th last: O(j2/(2jε)1/2) • O(1) • O(1/ε1/2) • Total space remains O(1/ε1/2) !
New Ingredient • Prune points of previous subepochs at the beginning of each new subepoch • Algorithm for subepoch does not touch points of previous epochs o x • j-th last: O(j/(2jε)1/2) • O(1/ε1/2) • O(1) • last log(1/ε) subepochs
Intuition for Subepoch • Point set is always stretched in vertical direction yi 2·d(yi,ox) yi-j 2·d(yi-j,ox) o x π/2 2·||ox|| π/4 … π/2j 0
Starting a Subepoch • Splitting and pruning π/2 π/2 π/4 π/4 … … π/2j π/2j π/2j+1 0 0
Intuition for Epoch • Point set is stretched in several directions π/2 π/4 … π/2j 0
Intuition for Epoch • Point set is stretched in several directions π/2 π/4 … π/2j 0
Intuition for Epoch • Point set is stretched in several directions π/2 π/4 … π/2j π/2 0 π/4 … π/2j+1 0
Intuition for Epoch • Point set is stretched in several directions • Overlay two angular partitions and maintain proper invariants π/2 π/4 … π/2j π/2 0 π/4 … π/2j+1 0
Extensions • Space-optimal approximation algorithm for maintaining width (smallest enclosing box, etc) in R2 • Space-optimal algorithm for maintaining (k, ε)-kernels in R2 • O(k /ε1/2) space, O(k log 1/ε) update time • Improved algorithm for maintaining ε-kernels in Rd • O(1/εd-3/2) space, O(log 1/ε) update time • Similar results for (k, ε)-kernels • Improved algorithms for numerous data-stream problems related to extent measures
Open Problems • Is the query time log (1/e) optimal if O(1/e1/2) space allowed? • Coresets in the sliding window model?