Download
1 / 82
840 likes | 1.11k Views
RTOS Scheduling – I : Rate-Monotonic Theory. EE202A (Fall 2003): Lecture #4. Reading List for This Lecture. Required

E N D
RTOS Scheduling – I :Rate-Monotonic Theory EE202A (Fall 2003): Lecture #4
Reading List for This Lecture • Required • Balarin, F.; Lavagno, L.; Murthy, P.; Sangiovanni-Vincentelli, A.; Systems, C.D.; Sangiovanni-, A. Scheduling for embedded real-time systems. IEEE Design & Test of Computers, vol.15, (no.1), IEEE, Jan.-March 1998. p.71-82. • Sha, L.; Rajkumar, R.; Sathaye, S.S. Generalized rate-monotonic scheduling theory: a framework for developing real-time systems. Proceedings of the IEEE, vol.82, (no.1), Jan. 1994. p.68-82. 28 references. • Recommended • Sha, L.; Rajkumar, R.; Lehoczky, J.P. Priority inheritance protocols: an approach to real-time synchronization. IEEE Transactions on Computers, vol.39, (no.9), Sept. 1990. p.1175-85. • Others • Liu, C.L.; Layland, J.W. Scheduling algorithms for multiprogramming in a hard-real-time environment. Journal of the Association for Computing Machinery, vol.20, (no.1), Jan. 1973. p.46-61. http://nesl.ee.ucla.edu/pw/ee202a/Liu73.pdf • Lehoczky, J.; Sha, L.; Ding, Y. The rate monotonic scheduling algorithm: exact characterization and average case behavior. Proceedings. Real Time Systems Symposium (Cat. No.89CH2803-5), (Proceedings. Real Time Systems Symposium (Cat. No.89CH2803-5), Santa Monica, CA, USA, 5-7 Dec. 1989.) Los Alamitos, CA, USA: IEEE Comput. Soc. Press, 1989. p.166-71.
Computation & Timing Modelof the System • Requests for tasks for which hard deadlines exist are periodic, with constant inter-request intervals • Deadlines consist of runnability constraints only • each task must finish before the next request for it • eliminates need for buffering to queue tasks • Tasks are independent • requests for a certain task does not depend on the initiation or completion of requests for other tasks • however, there periods may be related • Run-time for each task is constant for that task, and does not vary with time • can be interpreted as the maximum running time
Characterizing the Task Set • Set on n independent tasks 1, 2, … n • Request periods are T1, T2, ... Tn • request rate of i is 1/Ti • Run-times are C1, C2, ... Cn
Scheduling Algorithm • Set of rules to determine the task to be executed at a particular moment • One possibility: preemptive & priority driven • tasks are assigned priorities • statically or dynamically • at any instant, the highest priority task is run • whenever there is a request for a task that is of higher priority than the one currently being executed, the running task is interrupted, and the newly requested task is started • Therefore, scheduling algorithm == method to assign priorities
Assigning Priorities to Tasks • Static or fixed approach • priorities are assigned to tasks once for all • Dynamic approach • priorities of tasks may change from request to request • Mixed approach • some tasks have fixed priorities, others don’t
Critical Instant for a Task • Deadline for a task = time of next request of it • Overflow is said to occur at time t, if t is the deadline of an unfulfilled request • A scheduling algorithm is feasible if tasks can be scheduled so that no overflow ever occurs • Response time of a request of a certain task is the time span between the request and the end of response to that task
Critical Instant for a Task (contd.) • Critical instant for a task = instant at which a request for that task will have the maximum response time • Critical time zone of a task = time interval between a critical instant & the end of the response to the corresponding request of the task
When does Critical Instant occur for a task? • Theorem 1: A critical instant for any task occurs whenever the task is requested simultaneously with requests of all higher priority tasks • Can use this to determine whether a given priority assignment will yield a feasible scheduling algorithm • if requests for all tasks at their critical instants are fulfilled before their respective deadlines, then the scheduling algorithm is feasible
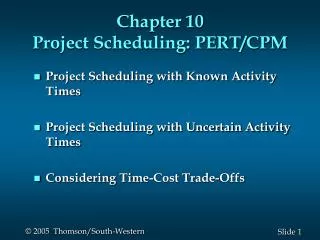
t 1 2 3 4 5 t 1 2 3 4 5 Example • Consider 1 & 2 with T1=2, T2=5, & C1=1, C2=1 • 1 has higher priority than 2 • priority assignment is feasible • can increase C2 to 2 and still be able to schedule T1 T1 t 1 2 3 4 5 T2 T2 t 1 2 3 4 5 CRITICAL TIME ZONE CRITICAL TIME ZONE
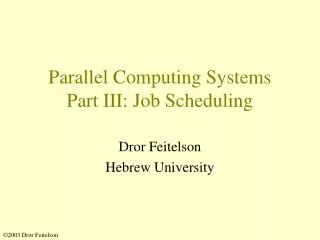
Example (contd.) • C2 has higher priority than 1 • priority assignment is still feasible • but, can ‘t increase beyond C1=1, C2=1 T2 t 1 2 3 4 5 T1 t 1 2 3 4 5 CRITICAL TIME ZONE
Observation • Consider 1 & 2 with T1 < T2 • Let, 1 be the higher priority task. From Theorem 1, the following must hold: T2/ T1 C1 + C2 T2(necessary condition, but not sufficient) • Let, 2 be the higher priority task. The following must hold: C1 + C2 T1
Observation (contd.) • Note: C1 + C2 T1 T2/ T1 C1 + T2/ T1 C2 T2/ T1 T1 T2/ T1 C1 + T2/ T1 C2 T1 T2/ T1 C1 + C2 T1 since T2/ T1 1 • Therefore, whenever T1 < T2 and C1, C2 are such that the task schedule is feasible with 2 at higher priority than 1, then it is also feasible with 1 at higher priority than 2 • but opposite is not true
A Possible Rule for Priority Assignment • Assign priorities according to request rates, independent of run times • higher priorities for tasks with higher request rates • CalledRate-Monotonic (RM) Priority Assignment • it is optimum • Theorem2: no other fixed priority assignment can schedule a task set if RM priority assignment can’t schedule it, i.e., if a feasible priority assignment exists then RM priority assignment is feasible • proof: can obtain a RM priority assignment by a sequence of pairwise reorderings of task priorities
Processor Utilization • Processor Utilization Factor: fraction of processor time spent in executing the task set • i.e. 1 - fraction of time processor is idle • For n tasks, 1, 2, … n the utilization factor U isU = C1/T1 + C2/T2 + … + Cn/Tn • U can be improved by increasing Ci’s or decreasing Ti’s as long as tasks continue to satisfy their deadlines at their critical instants
How Large can U be for a Fixed Priority Scheduling Algorithm? • Corresponding to a priority assignment, a set of tasks fully utilizes a processor if: • the priority assignment is feasible for the set • and, if an increase in the run time of any task in the set will make the priority assignment infeasible • The least upper boundof U is the minimum of the U’s over all task sets that fully utilize the processor • for all task sets whose U is below this bound, a fixed priority assignment which is feasible • U above this bound can be achieved only if the task periods Ti’s are suitably related
Utilization Factor for Rate-Monotonic Priority Assignment • RM priority assignment is optimal • for a given task set,the U achieved by RM priority assignment is the U for any other priority assignment • the least upper bound of U = the infimum of U’s for RM priority assignment over all possible T’s and all C’s for the tasks
Two Tasks Case • Theorem 3: For a set of two tasks with fixed priority assignment, the least upper bound to processor utilization factor is U=2(21/2-1) • Proof: • Let 1 and 2 be two tasks with periods T1 and T2, and run-times C1 and C2 • Assume T2 > T1 • According to RM, 1 has higher priority than 2 • In a critical time zone of 2, there are T2/T1 requests for 1
Two Tasks Case (contd.) • Proof contd.: • Adjust C2 to fully utilize the available processor time within the critical time zone • Case 1: C1 is short enough so that all requests for 1 within the critical time zone of 2 are completed before the next request of 2, i.e. C1 T2-T1T2 /T1 • then, largest possible C2 = T2 - C1 T2/T1 • so that, U = 1 - C1((1/T2)T2/T1 - 1/T1 ) • U monotonically decreases with C1
Two Tasks Case (contd.) • Proof contd.: • Case 2: The execution of the T2/T1 -th request for 1 overlaps the next request for 2, i.e. C1 T2-T1T2 /T1 • then, largest possible C2 = (T1 -C1) T2 /T1 • so that, U = (T1 / T2) T2 /T1+ C1((1/T1)-(1/ T2) T2 /T1) • U monotonically increases with C1 • The minimum U occurs at the boundary of cases 1 & 2, i.e. for C1 =T2-T1T2 /T1 • U = 1-(T1 / T2)(T2/T1 -(T2/T1))((T2/T1)- T2 /T1)
Two Tasks Case (contd.) • Proof contd.: • U = 1-(T1 / T2)(T2/T1 -(T2/T1))((T2/T1)- T2 /T1) = 1 - f(1-f)/(I+f)where I= T2 /T1 f= (T2/T1)- T2 /T1=fractional part of T2/T1 • U is monotonically increasing with I • min U occurs at min value of I, i.e. I=1 • Minimizing U over f, one gets f = 21/2-1 • So, min U = 2(21/2-1) 0.83 • Note: U=1 when f=1, i.e. when period of lower priority task is a multiple of the period of the higher priority task
General Case • Theorem: For a set of n tasks with fixed priority assignment, the least upper bound to processor utilization factor is U=n(21/n-1) • Or, equivalently, a set of n periodic tasks scheduled by RM algorithm will always meet their deadlines for all task start times if C1/T1 + C2/T2 + … + Cn/Tn n(21/n-1)
General Case (contd.) • As m, the U rapidly converges to ln 2 = 0.69 • This is a rather tight bound • But, note that this is just the least upper bound • tast set with larger U may still be schedulable • e.g., note that if {Tn/Ti} = 0 for I=1,2,…,n-1, then U=1 • How to check if a specific task set with n tasks is schedulable? • If U n(21/n-1) then it is schedulable • otherwise, use Theorem 1!
Theorem 1 Recalled • Theorem 1: A critical instant for any task occurs whenever the task is requested simultaneously with requests of all higher priority tasks • Can use this to determine whether a given priority assignment will yield a feasible scheduling algorithm • if requests for all tasks at their critical instants are fulfilled before their respective deadlines, then the scheduling algorithm is feasible • Applicable to any static priority scheme… not just RM
Example #1 • Task 1 : C1 =20; T1 =100; D1 =100Task 2 : C2 =30; T2 =145; D2 =145Is this task set schedulable?U = 20/100 + 30/145 = 0.41 2(21/2-1) = 0.828Yes!
Example #2 • Task 1 : C1 =20; T1 =100; D1 =100Task 2 : C2 =30; T2 =145; D2 =145Task 3 : C3 =68; T3 =150; D3 =150Is this task set schedulable?U = 20/100 + 30/145 + 68/150 = 0.86 > 3(21/3-1) = 0.779Can’t say! Need to apply Theorem 1.
Example #2 (contd.) • Consider the critical instant of 3, the lowest priority task • 1 and 2 must execute at least once before 3 can begin executing • therefore, completion time of 3 is C1 +C2 +C3 = 20+68+30 = 118 • however, 1 is initiated one additional time in (0,118) • taking this into consideration, completion timeof 3 = 2 C1 +C2 +C3 = 2*20+68+30 = 138 • Since 138 < D3 = 150, the task set is schedulable
Response Time Analysis for RM • For the highest priority task, worst case response time R is its own computation time C • R = C • Other lower priority tasks suffer interferences from higher priority processes • Ri = Ci + Ii • Ii is the interference in the interval [t, t+Ri]
Response Time Analysis (contd.) • Consider task i, and a higher priority task j • Interference from task j during Ri: • # of releases of task k = Ri/Tj • each will consume Cj units of processor • total interference from task j = Ri/Tj * Cj • Let hp(i) be the set of tasks with priorities higher than that of task i • Total interference to task i from all tasks during Ri:
Response Time Analysis (contd.) • This leads to: • Smallest Ri will be the worst case response time • Fixed point equation: can be solved iteratively
RM Schedulability • Consider tasks 1, 2, … n in decreasing order of priority • For task i to be schedulable, a necessary and sufficient condition is that we can find some t [0,Ti] satisfying the conditiont = t/T1C1 + t/T2C2 + … t/Ti-1Ci-1 + Ci • But do we need to check at exhaustively for all values of t in [0,Ti]?
RM Schedulability (contd.) • Observation: RHS of the equation jumps only at multiples of T1, T2, … Ti-1 • It is therefore sufficient to check if the inequality is satisfied for some t [0,Ti] that is a multiple of one or more of T1, T2, … Ti-1t t/T1C1 + t/T2C2 + … t/Ti-1Ci-1 + Ci
RM Schedulability (contd.) • Notation Wi(t) = j=1..iCjt/Tj Li(t) = Wi(t)/t Li = min0 t TiLi(t) L = max{Li} • General sufficient & necessary condition: • Task i can be scheduled iff Li 1 • Practically, we only need to compute Wi(t) at all timesi = {kTj | j=1,…,I; k=1,…,Tj/Tj} • these are the times at which tasks are released • Wi(t) is constant at other times • Practical RM schedulability conditions: • if minti Wi(t)/t 1, task i is schedulable • if maxi{1,…,n}{minti Wi(t)/t} 1, then the entire set is schedulable
Example • Task set: • 1: T1=100, C1=20 • 2: T2=150, C2=30 • 3: T3=210, C3=80 • 4: T4=400, C4=100 • Then: • 1 = {100} • 2 = {100,150} • 3 = {100,150,200,210} • 4 = {100,150,200,210,300,400} • Plots of Wi(t): task i is RM-schedulable iff any part of the plot of Wi(t) falls on or below the Wi(t)=t line.
Deadline Monotonic Priority Assignment (DMP) • Fixed priority of a process is inversely proportional to its deadline (< period) Di < Dj Pi > Pj • Optimal: can schedule any task set that any other static priority assignment can • Example: RM fails but DMP succeeds for the following
RM in Distributed/Networked Embedded Systems? • Task is essentially scheduled on multiple resources in series • Need to schedule communication messages over the interconnect • propagation delay & jitter • queuing delay & jitter • Divide end-to-end deadline into subsystem deadlines • Need buffering to mitigate jitter problem as task may arrive too early
Can one do better? • Yes… by using dynamic priority assignment • In fact, there is a scheme for dynamic priority assignment for which the least upper bound on the processor utilization is 1 • More later...
Transient Overload • Not RM schedulable if all tasks take their worst case execution times, but is schedulable in the average case • Can we arrange so that the three critical tasks always meet their deadlines, while the non-critical task meets many of its deadlines?
Dealing with Transient Overload • Transient system overload may cause some deadlines to be missed • Lower priority tasks are likely to miss their deadlines first in an overload situation • But, the more important task may have been assigned a lower priority: priority != importance • One could assign priorities according to importance • e.g. by artificially reducing smaller deadline • but… reduces schedulablity
Example • Consider two tasks: Task 1: C1 =3.5; T1 =10; D1 =10; less importantTask 2: C2 =7; T2 =14; D2 =13; critical task • 2 will have lower priority • completion time test shows that 2 is not schedulable • but is important and must be guaranteed! • Making priority 2 of 1 will make unschedulable
A Better Approach: Period Transformation • One could transform period of 2 to 7, yielding a modified task setTask 1: C1 =3.5; T1 =10; D1 =10Task 2a: C2a=3.5; T2a=7; D2a=6 • Note: in period transformation, the real deadline is at the last transformed period • deadline at the second transformed period of 2a is at most 6 (7+6=13) • Now, 2a has higher priority, and the task set is schedulable!
Using Period Transformation to Improve Schedulability • Consider two tasks: Task 1: C1=5; T1=10Task 2: C2=5; T2=15 • These two tasks are just schedulable with utilization 83.3% • If we transform, Task 1a: C1a=2.5; T1a=5Task 2: C2=5; T2=15the utilization bound becomes 100%
Sporadic Tasks • Tasks that are released irregularly, often in response to some event in the environment • no periods associated • but must have some maximum release rate (minimum inter-arrival time) • Otherwise no limit on workload! • How to deal with them? • consider them as periodic with a period equal to the minimum inter-arrival time • other approaches…
Handling Sporadic Tasks: Approach 1 • Define fictitious periodic task of highest priority and of some chosen execution period • During the time this task is scheduled to run, the processor can run any sporadic task that is awaiting service • if no sporadic task awaiting service, processor is idle • Outside this time the processor attends to periodic tasks • Problem: wasteful!
Handling Sporadic Tasks: Approach 2 (Deferred Server) • Less wasteful… • Whenever the processor is scheduled to run sporadic tasks, and finds no such tasks awaiting service, it starts executing other (periodic) tasks in order of priority • However, if a sporadic task arrives, it preempts the periodic task and can occupy a total time up to the time allotted for sporadic task • Schedulability?
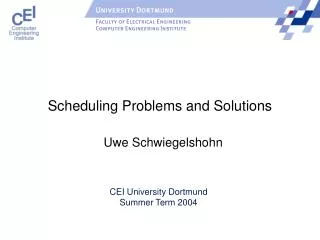
Example Approach 1 Approach 2 (Deferred Server)
Task Synchronization • So far, we considered independent tasks • However, tasks do interact: semaphores, locks, monitors, rendezvous etc. • shared data, use of non-preemptable resources • This jeopardizes systems ability to meet timing constraints • e.g. may lead to an indefinite period of priority inversion where a high priority task is prevented from executing by a low priority task
Priority Inversion Example • Let 1 & 3 share a resource & let 1 have a higher priority. Let 2 be an intermediate priority task that does not share any resource with either. Consider: • 3 obtains a lock on the semaphore S and enters its critical section to use a shared resource • 1 becomes ready to run and preempts . Next 1 tries to enter its critical section by trying to lock S. But S is locked and therefore 1 is blocked. • 2 becomes ready to run. Since only 2 and 3 are ready to run, 2 preempts 3 while 3 is in critical section.