Download
1 / 1
10 likes | 86 Views
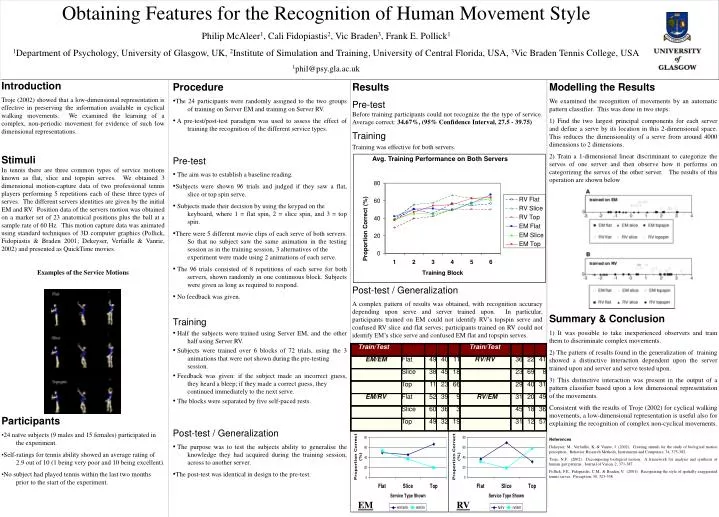
Obtaining Features for the Recognition of Human Movement Style Philip McAleer 1 , Cali Fidopiastis 2 , Vic Braden 3 , Frank E. Pollick 1

E N D
Obtaining Features for the Recognition of Human Movement Style Philip McAleer1, Cali Fidopiastis2, Vic Braden3, Frank E. Pollick1 1Department of Psychology, University of Glasgow, UK, 2Institute of Simulation and Training, University of Central Florida, USA, 3Vic Braden Tennis College, USA 1phil@psy.gla.ac.uk Train/Test Train/Test EM/EM Flat 49 40 11 RV/RV 36 22 41 Slice 38 45 18 23 69 8 Top 11 23 66 29 40 31 EM/RV Flat 52 39 9 RV/EM 31 20 49 Slice 60 36 3 45 18 36 Top 49 32 19 31 12 57 EM RV • Introduction • Troje (2002) showed that a low-dimensional representation is effective in preserving the information available in cyclical walking movements. We examined the learning of a complex, non-periodic movement for evidence of such low dimensional representations. • Stimuli • In tennis there are three common types of service motions known as flat, slice and topspin serves. We obtained 3 dimensional motion-capture data of two professional tennis players performing 5 repetitions each of these three types of serves. The different servers identities are given by the initial EM and RV. Position data of the servers motion was obtained on a marker set of 23 anatomical positions plus the ball at a sample rate of 60 Hz. This motion capture data was animated using standard techniques of 3D computer graphics (Pollick, Fidopiastis & Braden 2001; Dekeyser, Verfaille & Vanrie, 2002) and presented as QuickTime movies. • Examples of the Service Motions • Participants • 24 naïve subjects (9 males and 15 females) participated in the experiment. • Self-ratings for tennis ability showed an average rating of 2.9 out of 10 (1 being very poor and 10 being excellent). • No subject had played tennis within the last two months prior to the start of the experiment. • Procedure • The 24 participants were randomly assigned to the two groups of training on Server EM and training on Server RV. • A pre-test/post-test paradigm was used to assess the effect of training the recognition of the different service types. • Pre-test • The aim was to establish a baseline reading. • Subjects were shown 96 trials and judged if they saw a flat, slice or top spin serve. • Subjects made their decision by using the keypad on the keyboard, where 1 = flat spin, 2 = slice spin, and 3 = top spin. • There were 5 different movie clips of each serve of both servers. So that no subject saw the same animation in the testing session as in the training session, 3 alternatives of the experiment were made using 2 animations of each serve. • The 96 trials consisted of 8 repetitions of each serve for both servers, shown randomly in one continuous block. Subjects were given as long as required to respond. • No feedback was given. • Training • Half the subjects were trained using Server EM, and the other half using Server RV. • Subjects were trained over 6 blocks of 72 trials, using the 3 animations that were not shown during the pre-testing session. • Feedback was given: if the subject made an incorrect guess, they heard a bleep; if they made a correct guess, they continued immediately to the next serve. • The blocks were separated by five self-paced rests. • Post-test / Generalization • The purpose was to test the subjects ability to generalise the knowledge they had acquired during the training session, across to another server. • The post-test was identical in design to the pre-test. Modelling the Results We examined the recognition of movements by an automatic pattern classifier. This was done in two steps: 1) Find the two largest principal components for each server and define a serve by its location in this 2-dimensional space. This reduces the dimensionality of a serve from around 4000 dimensions to 2 dimensions. 2) Train a 1-dimensional linear discriminant to categorize the serves of one server and then observe how it performs on categorizing the serves of the other server. The results of this operation are shown below Summary & Conclusion 1) It was possible to take inexperienced observers and train them to discriminate complex movements. 2) The pattern of results found in the generalization of training showed a distinctive interaction dependent upon the server trained upon and server and serve tested upon. 3) This distinctive interaction was present in the output of a pattern classifier based upon a low dimensional representation of the movements. Consistent with the results of Troje (2002) for cyclical walking movements, a low-dimensional representation is useful also for explaining the recognition of complex non-cyclical movements. References Dekeyser, M., Verfaillie, K. & Vanrie, J. (2002). Creating stimuli for the study of biological motion perception. Behavior Research Methods, Instruments and Computers, 34, 375-382. Troje, N.F. (2002). Decomposing biological motion: A framework for analysis and synthesis of human gait patterns. Journal of Vision, 2, 371-387. Pollick, F.E., Fidopiastis, C.M., & Braden, V. (2001). Recognizing the style of spatially exaggerated tennis serves. Perception, 30, 323-338. Results Pre-test Before training participants could not recognize the the type of service. Average correct: 34.67%, (95% Confidence Interval, 27.5 - 39.75) Post-test / Generalization A complex pattern of results was obtained, with recognition accuracy depending upon serve and server trained upon. In particular, participants trained on EM could not identify RV’s topspin serve and confused RV slice and flat serves; participants trained on RV could not identify EM’s slice serve and confused EM flat and topspin serves. Training Training was effective for both servers. Avg. Training Performance on Both Servers