Download
1 / 34
370 likes | 563 Views
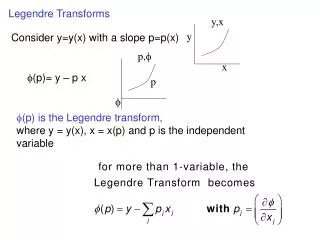
The concept of duality in Asymptotic Geometric Analysis: The Legendre Transform. Shiri Artstein-Avidan and Vitali Milman Tel Aviv University. For a function f : R n R let (Lf)(x) = sup { <x,y>- f(y) } . U {± ∞ }. y. The Legendre transform: .

E N D
The concept of duality in Asymptotic Geometric Analysis:The Legendre Transform. Shiri Artstein-Avidan and Vitali Milman Tel Aviv University.
For a function f : Rn R let (Lf)(x) = sup { <x,y>- f(y) } U {±∞} y The Legendre transform: Fix a scalar product <·, ·> on Rn This is an involution on the class of convex lower semi-continuous functions on Rn
Example:For f(x) = /2 , we have (Lf)(x) = /2 Define:Cvx(Rn) is the set of lower semi continuous convex functions on Rn with values possibly infinite. Most simple Examples: functions which are infinity everywhere but one point ; linear functions.
We illustrate in this talk how the concrete formula for the Legendre transform can be obtained directly from “abstract duality’’ Abstract duality concept: 1. For all f, T(T(f)) = f 2. For all f < g one hasT(f)> T(g) (Notice that condition 1 implies that T is 1-1 and onto)
Theorem 1:Any T: Cvx(Rn) Cvx(Rn)satisfying that (1) For all f, T(T(f))=f (2) For all f < g one has T(f) > T(g) must satisfy for some symmetric B in GLn , v0 in Rn, and C0 in R, that (Tf)(x) = C0 + <v0 , x> + (Lf) (Bx+v0). Remark: <v0 , x> versus (Lf)(x+v0)…
Remark: <v0 , x> versus (Lf)(x+v0)… Notice that: (L(f+<•, v>))(x) = sup <x, y> - f(y)-<y,v> = sup <x-v, y> -f(y) = (Lf)(x-v).
Theorem 1’:Any 1-1 and onto T: Cvx(Rn) Cvx(Rn)satisfying that (1) For all f < g one has T(f) > T(g) (2) For all T(f) < T(g) one has f > g must satisfy for some fixed B in GLn , v0 and v1 in Rn, C1 positive and C0 in R, that (Tf)(x) = C0+<v0 , x>+C1(Lf)(Bx+v1).
Remark: The requirement of onto is important: Consider the transformation T given by T(f) = L (f + x2) It is order reversing (not an involution, of course) 1-1 but not onto. Remark: compare with Böröczky-Schneider
The sketch of the proof we will see consists of three parts: (1) “Min” and “Max” are interchanged (2) It is enough to know what happens to delta functions, or linear functions (3) Because of order-reversion, and the special properties of these “extreme functions”, we can determine their behavior.
First step: If T is 1-1 and onto and satisfies 1. f < g implies T(f) > T(g) 2. T(T(f)) = f then, T(min(f,g)) = max(T(f), T(g)) and, T(max(f,g)) = min (T(f), T(g)) Where “min” should be understood as regularized minimum.
The proof is quite simple: Since min(f,g)< f, g we have T(min(f,g)) ≥ T(f) , T(g) , so that T(min(f,g)) ≥ max(T(f), T(g)). Secondly, max(T(f), T(g)) = T(h) for some h, in fact, for h= T(max(T(f), T(g))). Thus T(h) ≤ T(min(f,g)) so h ≥ min (f,g). But then again h ≤ f , and h ≤ g , so h ≤ min(f,g) and we get equality.
In fact, we may show a more general fact: If T is 1-1 and onto and satisfies 1. f<g implies T(f)>T(g) 2. T(f) < T(g) implies f >g then, T(min(f,g)) = max(T(f), T(g)) and, T(max(f,g)) = min (T(f), T(g)) where “min” should be understood as regularized minimum.
Claim: If we know what happens to Dx+c for all x in Rn and c in R, we know the form of the transform. Proof: f(x) = inf (Dy(x) + f(y)) and so (Tf)(x) = sup T(Dy+f(y))(x) y y Notation: the delta functions Dx: Dx(x)= 0, and infinity elsewhere
Claim: If we know what happens to hx+c for all x in Rn, we know the form of the transform. Proof: f(x) = sup (hu(x) + c(u)) and so (Tf)(x) = inf T(hu+c(u))(x) (here inf is regularized infimum) u u Notation: linear functions hx: lu(y)= <u,y>
To find out what is the image of the delta functions (and/or the linear functions) Let us notice a few facts about these “elementary functions”
…same true for the functions Dx+c’… x Delta functions Dx x …if f> Dx , then f=Dx+c for some c>0…
…same true for the functions u hu+c’… Linear functions hu=<x, u> u …if f<hu , then f=hu-c for some c>0…
Let T(hu)= w. (for hu = <·,u>) If f >w and g>w , then T(f)< T(w) = hu , and T(g)<T(w) = hu. This means T(f) and T(g) are both linear: T(f)= hu-c and T(g)= hu-c’. In particular: either T(f)>T(g) or T(g)>T(f) Therefore: either f<g or g<f.
Second: If the “support” of w includes two points x and y, we may build two non-comparable functions f>w , g>w: w(y) w(x) x y We see that: (letting w =T(hu)) Any two functions f>w and g>w are comparable. (Notice: this is true for w=Dx .)
u(x) c’(x,c) Conclude: The “support” of w is just one point, and so for every vector u we have that T(hu) = Dx+ c for some vector x and some constant c. (In fact, for every vector u and constant c T(hu+ c) = Dx+ c’ for some vector x and some constant c’.) We may similarly show that for every x and c there are u and c’ with T(Dx + c) = hu+ c’
u(x) c’(x,c) Next we establish the linearity of this relation, namely we show: There exists some symmetric B in GLn , a vector v0 in Rn and a constant c0 such that for every vector x and constant c we have that T(Dx+c) = hBx+v0+ <x,v0> — c + c0
This would complete the proof since: (Tf)(x) = sup T(Dy+f(y))(x) we know T(Dx+c) = hBx+v0 +<x,v0> — c + c0 And thus: (Tf )(x) = sup (<y,v0>+hBy+v0 (x)— f(y) + c0) = c0+ sup (<y,v0> +<x, By+v0>— f(y)) = c0+ <x, v0> + sup (<v0+Bx,y> — f(y)) = c0+ <x, v0>+(Lf )(v0+Bx)
The linearity of the correspondence is established as follows: T(Dx+c) = hBx+v0 +<x,v0> — c + c0 Fact: if F: Rm Rm, 1-1 and onto, satisfies that for every interval [x,y] we have that F([x,y]) is also an interval, then F is affine linear, namely F(x) = Ax+v for some fixed A in GLm and v in Rm.
Define the mapping F : Rn+1 Rn+1 by F((x,c)) = (u,c’) Where T(Dx+c) = hu+c’ Consider the interval [(x,c1),(y,c2)]. Any (z,c) inside this interval satifies that Dz+c ≥ “min” (Dx+c1, Dy+c2) And that the same is not true for (Dz+c’) for any c’<c.
Consider the interval [(x,c1),(y,c2)]. Any (z,c) inside this interval satisfies that Dz+c ≥ “min” (Dx+c1, Dy+c2) And that the same is not true for (Dz+c’) for any c’<c. Letting F(x,c1) = (u,c’) and F(y,c2)=(v,c’’): (hw+c’’’=) T(Dz+c) ≤ max (hu+c’, hv+c’’) And the same is not true for (Dz+c’) for any c’<c.
hv+c’’ So, T(Dz+c) = hw+c’’’ with w in [u,v] hu+c’ ~ (notice that T(Dz+c) are all parallel)
Conclude: the mapping F given by F((x,c)) = (u,c’), where T(Dx+c) = hu+c’ is mapping intervals to intervals and so, by the fact stated before, must be affine linear: F(x,c) = A(x,c)+v for some fixed A in GLn+1 and v in Rn+1. Finally, we should show that A and v are in fact composed of a symmetric B in GLn and a vector v0 in Rn as follows: A(x,c)+v = ( Bx+v0 , <v0 ,x> — c+c0) u(x) c’(x,c)
A(x,c)+v = ( Bx+v0 , <v0 ,x> —c+c0) This is not difficult.. (show that: first coordinate doesn’t depend on c, second coordinate’s dependency on c is involutive, relation between A’s last row and v’s entries: again, from involution) So that T(Dx+c) =hBx+v0 +<v0 , x> —c+c0 End of Proof.
Theorem 1:Any T: Cvx(Rn) Cvx(Rn)satisfying that (1) For all f, T(T(f))=f (2) For all f < g one has T(f) > T(g) must satisfy for some symmetric B in GLn , v0 in Rn, and C0 in R, that (Tf)(x) = C0 + <v0 , x> + (Lf) (Bx+v0). We have sketched the proof of:
Theorem 2: Any T: Log-Conc(Rn) Log-Conc(Rn)satisfying that (1) For all f, T(T(f))=f (2) For all f < g one has T(f) > T(g) must satisfy for some symmetric B in GLn , v0 in Rn, and C0>0, that (Tf)(x) = C0 e-<v0,x> inf e-<Bx+v0,y>/f(y). (first defined in A-Klartag-M)
Theorem (Böröczky-Schneider) (using Grüber):For n ≥ 2, any T: K0(Rn) K0(Rn)satisfying that (1) For all K, T(T(K))=K (2) For all K1 K2 one has T(K2) T(K1) must satisfy for some symmetric B in GLn that T(K) = BK0
Theorem 3:Any T: K(Rn) K(Rn)satisfying that (1) For all K, T(T(K))=K (2) For all K1 K2 one has T(K2) T(K1) must satisfy for some symmetric B in GLn that T(K) = BK0
Theorem 4:Any T: Concs(Rn) Concs(Rn)satisfying that (1) For all f, T(T(f))=f (2) For all f < g one has T(f) > T(g) must satisfy for some symmetric B in GLn and C0>0, that (Tf)(x) = C0 inf (1-<x,y>)s/f(By). + y (also used in A-Klartag-M)
Theorem 5:Any T: Cvx(Rn) Cvx(Rn)satisfying that (1) For all f, T(T(f))=f (2) For all f,g one has T(f g)=T(f)+T(g) must satisfy for some symmetric B in GLn that (Tf)(x) = (Lf)(Bx). (Part of a joint work with Semyon Alesker) (f g)(z) = inf (f(x) + g(y)) x+y=z