Download
1 / 16
180 likes | 845 Views
Array Element Localization Using Ship Noise Mike Morley Stan Dosso, Ross Chapman Pacific Rim Underwater Acoustics Conference, Vancouver, BC October 4, 2007 Array Element Localization

E N D
Array Element Localization Using Ship Noise Mike Morley Stan Dosso, Ross Chapman Pacific Rim Underwater Acoustics Conference, Vancouver, BC October 4, 2007
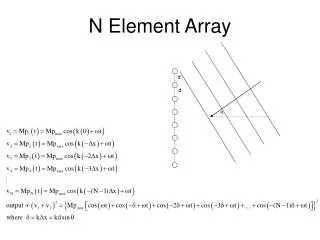
Array Element Localization • AEL : Using measured acoustic travel times to estimate individual receiver positions on an array (source positions). Source xr, yr, zr xs, ys, zs Receivers c(z) Seabed
χ2 data misfit Prior est. Smoothness AEL inversion method • Iterative linearized inversion of ray-tracing eqns: • Regularization: • Prior position and uncertainty estimates • Array and/or source track smoothness Minimize: Where:
GoM experiment • VLA deployed in ~800 m of water • VLA allowed to freefall to seafloor • Recorded water-gun & ship-noise data along tracks • Severe timing errors/clipping in water-gun data • Ship noise data used instead
VLA • 16 hydrophones, 12.5 m spacing • 200 m aperture • Autonomous recording and data storage • 6-s record every 18 s • 10 kHz sampling rate
Ship noise data processing • Obtained relative acoustic arrival times from cross correlations of ship noise • 20–600 Hz band-pass filter applied to ship noise before cross correlating
Ship noise data processing Results of cross correlating h/phs 2 & 6 along N-S track line
Data and prior uncertainties Relative travel-time picks from cross correlation • 13 rec. & 64 src. positions → 832 data • 295 unknowns: (xr, yr, zr, xs, ys, zs, t0) • Data uncertainty: σt = 0.2 ms • Prior pos’n uncertainties: Rec: δxr = δyr = 1000 m, δzr = 100 m Src: δxs = δys = 15 m, δzs = 3 m
Results Plan view of src. & rec. positions • Inversion initialized from VLA drop position • Sol’n converged in 7 iterations • VLA repositioned ~44 m SE of deployed position • Source positions unchanged from prior estimates
Results Profile view of array shape • Top of array deflected: • ~5.5 m towards SSE • agrees with avg. dir. of bottom current (ADCP) • H/ph spacing: • 12.6 m (inversion) • 12.5 m (nominal) • Water depth: • 768.8 m (inversion) • 769.0 m (charted)
Data residuals Data residuals from prior and estimated model • Fit data to χ2 = N = 832 • >23 times smaller than for starting model • Avg. data fit to 0.2 ms
Model uncertainties ¯¯ x -- y ··· z ـــr = (x2 + y2)½ • Linearized uncertainty est. • Absolute Monte Carlo • 500 iterations of inversion • Gaussian errors added to data, priors & starting model • Relative Monte Carlo • Trans. & rot. errors removed
Array geometry vs. source repositioning: Synthetic study Plan view of true src. & rec. positions Incl. horizontal aperture: • 9 receivers • 150 m separation b/t receivers • 64 source positions • Receiver pattern offset 70 m in X, -120 m in Y to break symmetry • Gaussian rand. errors added to data and true src. & rec. positions
Array geometry vs. source repositioning: Synthetic study • Both src. & rec. positions improved from prior estimates
Array geometry vs. source repositioning: Synthetic study Source position errors • Abs. errors in general agreement with linearized estimates ¯¯ Estimated uncertainty •Absolute errors
Conclusions • Relative acoustic travel times were obtained from ship noise by cross correlation of filtered time series b/t separated receiver pairs • Accurate h/ph positions were obtained from inversion broadband ship noise • Array with horizontal aperture allows for better source repositioning – avoid symmetry in src/rec geometry • Negates need for impulsive acoustic source: • Allows for use of sources of opportunity • where there is worry of acoustic environmental impact • where covertness is required