Download
1 / 1
10 likes | 146 Views
Project Hercules – Autonomous Rescue Quadrotor Ravi Basnet, Hao Zhang, Kaixiang You Electrical Engineering Department Bucknell University. Overview. Boards.

E N D
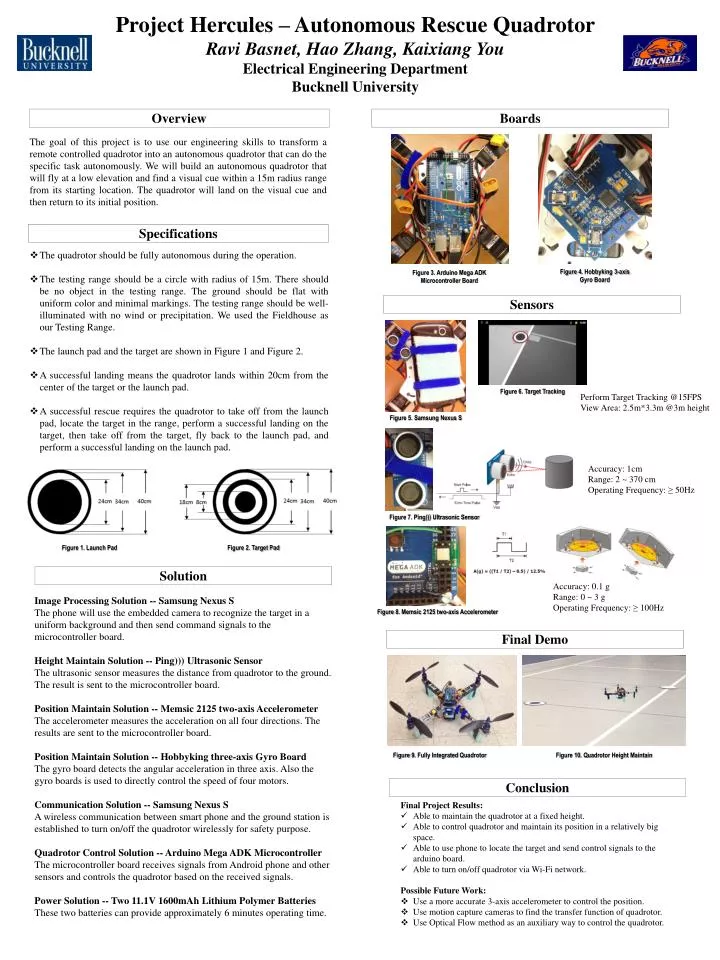
Project Hercules – Autonomous Rescue Quadrotor Ravi Basnet, Hao Zhang, Kaixiang You Electrical Engineering Department Bucknell University Overview Boards The goal of this project is to use our engineering skills to transform a remote controlled quadrotor into an autonomous quadrotor that can do the specific task autonomously. We will build an autonomous quadrotor that will fly at a low elevation and find a visual cue within a 15m radius range from its starting location. The quadrotor will land on the visual cue and then return to its initial position. Specifications • The quadrotor should be fully autonomous during the operation. • The testing range should be a circle with radius of 15m. There should be no object in the testing range. The ground should be flat with uniform color and minimal markings. The testing range should be well-illuminated with no wind or precipitation. We used the Fieldhouse as our Testing Range. • The launch pad and the target are shown in Figure 1 and Figure 2. • A successful landing means the quadrotor lands within 20cm from the center of the target or the launch pad. • A successful rescue requires the quadrotor to take off from the launch pad, locate the target in the range, perform a successful landing on the target, then take off from the target, fly back to the launch pad, and perform a successful landing on the launch pad. Figure 4. Hobbyking 3-axis Gyro Board Figure 3. Arduino Mega ADK Microcontroller Board Sensors Figure 6. Target Tracking Perform Target Tracking @15FPS View Area: 2.5m*3.3m @3m height Figure 5. Samsung Nexus S Accuracy: 1cm Range: 2 ~ 370 cm Operating Frequency: ≥ 50Hz Figure 7. Ping))) Ultrasonic Sensor Figure 1. Launch Pad Figure 2. Target Pad Solution Accuracy: 0.1 g Range: 0 ~ 3 g Operating Frequency: ≥ 100Hz Image Processing Solution -- Samsung Nexus S The phone will use the embedded camera to recognize the target in a uniform background and then send command signals to the microcontroller board. Height Maintain Solution -- Ping))) Ultrasonic Sensor The ultrasonic sensor measures the distance from quadrotor to the ground. The result is sent to the microcontroller board. Position Maintain Solution -- Memsic 2125 two-axis Accelerometer The accelerometer measures the acceleration on all four directions. The results are sent to the microcontroller board. Position Maintain Solution -- Hobbyking three-axis Gyro Board The gyro board detects the angular acceleration in three axis. Also the gyro boards is used to directly control the speed of four motors. Communication Solution -- Samsung Nexus S A wireless communication between smart phone and the ground station is established to turn on/off the quadrotor wirelessly for safety purpose. Quadrotor Control Solution -- Arduino Mega ADK Microcontroller The microcontroller board receives signals from Android phone and other sensors and controls the quadrotor based on the received signals. Power Solution -- Two 11.1V 1600mAh Lithium Polymer Batteries These two batteries can provide approximately 6 minutes operating time. Figure 8. Memsic 2125 two-axis Accelerometer Final Demo Figure 9. Fully Integrated Quadrotor Figure 10. Quadrotor Height Maintain Conclusion • Final Project Results: • Able to maintain the quadrotor at a fixed height. • Able to control quadrotor and maintain its position in a relatively big space. • Able to use phone to locate the target and send control signals to the arduino board. • Able to turn on/off quadrotor via Wi-Fi network. • Possible Future Work: • Use a more accurate 3-axis accelerometer to control the position. • Use motion capture cameras to find the transfer function of quadrotor. • Use Optical Flow method as an auxiliary way to control the quadrotor.