Download
1 / 10
130 likes | 147 Views
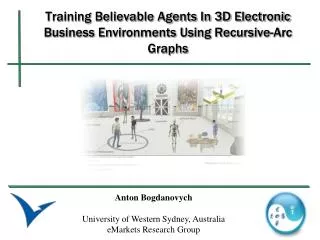
Robot Improv : Using Drama to Create Believable Agents. Allison Bruce, Jonathan Knight, Samuel Listopad, Brian Magerko, Illah Nourbakhsh. Motivation. Physical robots as believable agents Instead of modeling human behavior, model the behavior of actors Mechanism is known

E N D
Robot Improv : Using Drama to Create Believable Agents Allison Bruce, Jonathan Knight, Samuel Listopad, Brian Magerko, Illah Nourbakhsh Robotics Institute, Carnegie Mellon
Motivation • Physical robots as believable agents • Instead of modeling human behavior, model the behavior of actors • Mechanism is known • Designed for believability Robotics Institute, Carnegie Mellon
Definitions • Hero • Villain • Outer obstacles • Inner obstacles • Given circumstances Robotics Institute, Carnegie Mellon
The Play • Two robots in acting class • Improvisation: an introductory exercise Robotics Institute, Carnegie Mellon
Implementation • Nomad Scouts • Planner and motion control code written in Java • 900 Mhz Radio Modems • Text-to-speech synthesis software Robotics Institute, Carnegie Mellon
Play Architecture • Room • Props • Actors • Inner obstacles • Goals • Behaviors • Inner obstacles • Actions Robotics Institute, Carnegie Mellon
Execution Loop • Listen and Update • Success function • Inner obstacle perturbation and decay • Choose Action • 2-level hierarchical planner • Act • Sonar-based obstacle avoidance • Communicate • Position, Action, Dialog Robotics Institute, Carnegie Mellon
Experiments • First public performance April ’99 at CMU • Performed at AAAI ’99 robotics exhibition 10-15 times using 6 actor personalities • Performed 18 more times at CMU for video documentation Robotics Institute, Carnegie Mellon
Performances Robotics Institute, Carnegie Mellon
Results • Embodiment matters • Improvisation relies on physical factors • Possible improvements • More sophisticated dialog selection • Transitions between behaviors • Public response • Future work • Longer, more complex plays • Acting with humans Robotics Institute, Carnegie Mellon