Download

1 / 48
480 likes | 920 Views
By NIKHIL SURYANARAYANAN. Efficient Architectures for Eigen Value Decomposition. Outline. Motivation Eigen Value Decomposition & Applications Exact Jacobi Parallel Decomposition using Systolic Array Optimization of Systolic Array Interconnect optimized Systolic Array Conclusion.

E N D
By NIKHIL SURYANARAYANAN Efficient Architectures for Eigen Value Decomposition
Outline • Motivation • Eigen Value Decomposition & Applications • Exact Jacobi • Parallel Decomposition using Systolic Array • Optimization of Systolic Array • Interconnect optimized Systolic Array • Conclusion
Motivation • Required in various fields • High Performance and Real time applications demands Hardware implementation • SDMA Communication • Realizing optimal architectures with respect to speed and power for respective applications
Eigen Value Decomposition • Angle of Arrival Estimation • Face Detection • Image Compression • Eigen Beam-forming • Signal Subspace Estimation • PCA • MUSIC & ESPRIT
EVD Methods • Exact Jacobi • Systolic Array • Approximate Jacobi • Algebraic Method (only for 3x3 matrix)
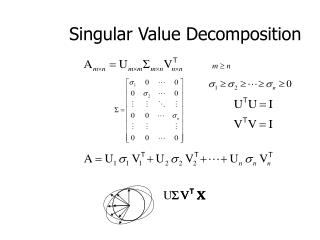
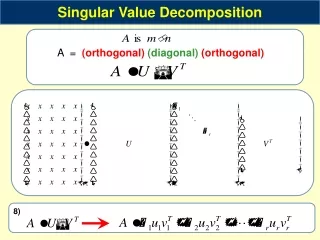
Eigen Value Decomposition (EVD) • Special case of Singular Value Decomposition (SVD) where the Matrix is Square-Symmetric • Consider a Matrix AЄRmxn SVD: A = UDVT EVD: A = UDUT where, DЄRmxn is diagonal matrix, UЄRmxn & VЄRmxn are orthogonal
CORDIC • COordinate Rotation DIgital Computer • Set of Shift Add Algorithms for computing Sine, Cosine, Arc, Hyperbolic, Coordinate Rotation etc • Eliminates complex computations • Single Shift-Add Multiplier, ROM/RAM for lookup & Basic Logic gates • Hardware friendly • Iterative Algorithm
CORDIC Modules ArcTan Module Used to compute the tan-1 / angle for constructing the Jacobi Rotation Matrix Sine/Cosine Module cos sin -sin cos 2x2 matrix is constructed using the angle from the ArcTan module
Exact Jacobi • Aims at annihilating the off diagonal elements using a series of orthogonal transformations • A(k+1) = JTpq A(k) Jpq, where A(0)=A Jpq is called the Jacobi Rotation Defined by the parameter (c s, -s c)
Exact Jacobi • A=UDVT • UTAV=D After n iterations, • Ai+1=JiTAiJi • Repeating for all possible pairs, A can be effectively diagonalized 1......0......0......0 . . . . 0......c......s......0 p . . . . 0......-s......c......0 q . . . . 0......0......0......1 pq
Limitations of Exact Jacobi Implementation • Jacobi iterations are serial • Inability to derive parallelism as iterations have large inter-loop Data Dependency • Inability to pipeline • Every iteration involves transfer of 4N-4 matrix elements to the processor • Even though it is “MATRIX” operation, parallelism cannot be derived
How to parallelize? • Systolic Array • Solve 2x2 EVD sub problems • For a matrix of size N we have N/2xN/2 EVD sub problems • If N=6; possible sets are { (1,2), (3,4) } { (1,3), (2,4) } { (1,4), (2,3) } • Parallel Reordering
Systolic Array for EVD PE PE PE PE PE PE PE PE PE
Structure of PE CORDIC ATAN CORDIC ROT REG REG
Data Exchange Sequence βin αin α β PEij γ δ γin δin
Data Exchange PE11 βin αin α β γ δ γin δin
Data Exchange PE1j βin αin α β γ δ γin δin
Data Exchange PEi1 βin αin γ δ α β γin δin
Data Exchange PEij βin αin γ δ β α γin δin
Array Cycle ∆ = 1 1 1 1 1 1
Array Cycle ∆ = 1 1 1 1 1 1 1 1 1 1 1 1 1 1
Array Cycle ∆ = 1 DATA EXCHANGE 1 1 1 1 1 1 1 1 1 1 1
Array Cycle ∆ = 1 DATA EXCHANGE 1 2 1 1 2 1 1 2 1 1 2 1 1 2
Array Cycle ∆ = 1 DATA EXCHANGE 1 2 1 2 1 2 2 1 2 2 1 2 1 2 1
Array Cycle ∆ = 1 DATA EXCHANGE 1 2 1 2 2 1 2 2 1 2 1
Array Cycle ∆ = 1 DATA EXCHANGE 1 3 2 1 3 2 1 3 2 1 3 2 1 3
Array Cycle ∆ = 1 DATA EXCHANGE 1 3 2 3 1 3 3 1 3 3 1 3 2 3 1
Array Cycle ∆ = 1 DATA EXCHANGE 1 3 1 3 3 1 3 3 1 3 1
Staggered Processing? • Not realistic to broadcast row and column angles in real time • ∆ij is the distance of the processor Pij from the diagonal • Also Pij needs data from neighbors Pi+-1,j+-1 (1< i, j < n/2) • Can be made faster by allowing off-diagonal PE to allow execution as soon as the diagonal PE produce angles
Optimizations CYCLE 2 1’ 1 CYCLE 1 1 1’ 1 1 1’ 1 1 1’ 1 1 1’ Improves the utilization time for each PE from 1/3 rd to 2/3 rd
Comparisons…. Matrix 8x8 • Iterations for Convergence ≈ 3 • Additions ≈ 3500 • Multiplications ≈ 7000 • Swaps/Exchange ≈ 0 • Slower • Iterations for Convergence ≈ 22-25 • Additions ≈ 1500 (less than half) • Multiplications ≈ 3000 • Swaps/Exchange = 368 • Faster EXACT JACOBI SYSTOLIC ARRAY
Optimized Architecture • In the final Stages of Analyzing a simpler Systolic Architecture Matrix size=4x4 Φ1 Φ2 PE PE PE PE
GOALS • Achieved: • Pipelined Jacobi Architecture • S/W Implementation of Systolic Array • Simultaneous execution of off diagonal PE to improve timing and reduce idle time • Optimized Systolic Array architecture for minimum swaps and angle transmission
References • Andraka, Ray, “Survey of CORDIC algorithms for FPGA based computers”, ACM 1998 • A Novel Implementation of CORDIC Algorithm Using Backward Angle Recoding (BAR), Yu Hen Hu & Homer H.M. Chern, IEEE Transactions on Computers, December 1996 • Parallel Eigen Value Decomposition for Toeplitz and Related Matrices, Yu Hen Hu, IEEE Transactions-1989 • Kim Y, Kim Y, Doyle James, “A Low Power CMOS CORDIC Processor Design for Wireless Telecommunications”, IEEE 2007 • Hemkumar N, Masters Thesis, Rice University • Yang Liu et al, “Hardware Efficient Architectures for Eigen Value Computation;, EDA 2006 • ASIC Implementation of Autocorrelation and CORDIC algorithm for OFDM based WLAN, Sudhakar Reddy & Ramchandra Reddy, European Journal of Scientific Research, 2009 • Advanced Algorithmic Evaluation for Imaging, Communication and Audio Applications – Eigenvalue Decomposition using CATAPULT C Algorithmic Synthesis Methodology • Efficient Implementation of SVD on a Reconfigurable System, Christophe Bobda, Klaus Danne and Andre Linarth, Springer-Verlag Berlin Heidelberg 2003 • Hardware Implementation of Smart Antenna Systems, H. Wang and M. Glesner, Adv in Radio Sciences 2006 • Spectral Estimation using MUSIC Algorithm, Jawed Qumar, Nios II Embedded Processor Design Contest-2005 • Hardware Efficient Architectures for Eigen Value Computation, Yang Liu, Christis-Savvas Bouganis, Peter Y.K. Cheung, Philip H.W. Leong, Stephen J. Motley, EDAA 2006 • A Novel Fast Eigenvalue Decomposition based on Cyclic Jacobi Rotation and its application in eigen-beamforming, Tech Report of IEICE-Japan • Efficient Hardware Architectures for Eigenvector and Signal Subspace Estimation, Fan Xu & Alan Wilson, IEEE Transactions on Circuits & Systems-204 • 16 BIT CORDIC Rotator for High Sped Wireless LAN, Koushik Maharatna, Alfonso Troya, Swapna Banerjee, Eckhard Grass, Milos Krstic, IEEE Transactions-2004 • Survey of CORDIC Algorithms for FPGA Based computers, Ray Andraka, ACM-1998 • Smart Antennas for Wireless Communications, Frank B Gross, Mc-Graw Hill,2005 ( Used for Facts & References for Comparison purposes and Specifications of Different wireless standards)
Eigen Value and Eigen Vector • The non zero vector of any linear transformation when applied to the vector changes the magnitude but not the direction is an Eigen Vector • The scalar value associated with this vector is called the Eigen Value • Ax=λx • A is the transformation, x is the Eigen vector & λ is the corresponding Eigen Value
CORDIC… contd • Convergence depends on number of iterations • Unrolled for Systolic and Pipeline implementations • Iterative architecture unsuitable for FPGA • Pipelined preferred as less complex H/W & operates at data rate • Registers present on Logic cells in FPGAs support pipelining better • Runs at 52 MHz on XC4013E-2 [1]
CORDIC Iteration Equations • Given’s rotation transformation x = x cosΦ – y sinΦ y = y cosΦ + x sinΦ The iteration equations are given as xi+1 = xi – yi . di . 2-i yi+1 = yi + xi. di. 2-i zi+1 = zi – di . tan-1(2-i)
CORDIC Algorithms for i=1:n x1= x – y * d * (2^-(i-1)) ; y1= y + x * d * (2^-(i-1)) ; angle = angle – d * (W(i)); // W(i) is the ith ROM reference if (angle==0) d=0; elseif (angle>0) d=1; else d=-1; end x=x1; y=y1; end
Exact Jacobi Algorithm for j=1:n-1 for i=n:-1:j+1 J = jacobi_rot( A( i, i), A( j, j), A( i, j) ); A( [ i, j], :)=J'*A( [ i, j], : ); A( : , [ i, j])=A( :, [ i, j] )*J; end end REPEAT for n iterations for accuracy
EVD …contd • Also UTU=I and VTV=I • The Diagonal matrix contains Eigen Values along its diagonals • U are the left Singular Vectors & V are right singular vectors • U = {u1,u2,………,un} • V = {v1,v2,………,vn}